Artificial Intelligence
- Data Science
- Hardware & Sensors

Machine Learning
Agriculture.
- Defense & Cyber Security
- Healthcare & Sports
- Hospitality & Retail
- Logistics & Industrial
- Office & Household
- Write for Us
How AI & robotics are addressing rising fuel costs
Transforming the gaming industry with rpa and intelligent automation, how to detect and monitor against unauthorized drone use, how robots are used to handle explosives, how hackers use machine learning to breach cybersecurity, six reasons to ban lethal autonomous weapon systems (laws), common mistakes to avoid when using a demat account, warehouse robotics companies in europe transforming order fulfillment [updated], why businesses should invest in decentralized apps, a close watch: how uk businesses benefit from advanced cctv systems, empowering small businesses: the role of it support in growth and….
- Technologies
500 research papers and projects in robotics – Free Download

The recent history of robotics is full of fascinating moments that accelerated the rapid technological advances in artificial intelligence , automation , engineering, energy storage, and machine learning. The result transformed the capabilities of robots and their ability to take over tasks once carried out by humans at factories, hospitals, farms, etc.
These technological advances don’t occur overnight; they require several years of research and development in solving some of the biggest engineering challenges in navigation, autonomy, AI and machine learning to build robots that are much safer and efficient in a real-world situation. A lot of universities, institutes, and companies across the world are working tirelessly in various research areas to make this reality.
In this post, we have listed 500+ recent research papers and projects for those who are interested in robotics. These free, downloadable research papers can shed lights into the some of the complex areas in robotics such as navigation, motion planning, robotic interactions, obstacle avoidance, actuators, machine learning, computer vision, artificial intelligence, collaborative robotics, nano robotics, social robotics, cloud, swan robotics, sensors, mobile robotics, humanoid, service robots, automation, autonomous, etc. Feel free to download. Share your own research papers with us to be added into this list. Also, you can ask a professional academic writer from CustomWritings – research paper writing service to assist you online on any related topic.
Navigation and Motion Planning
- Robotics Navigation Using MPEG CDVS
- Design, Manufacturing and Test of a High-Precision MEMS Inclination Sensor for Navigation Systems in Robot-assisted Surgery
- Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
- One Point Perspective Vanishing Point Estimation for Mobile Robot Vision Based Navigation System
- Application of Ant Colony Optimization for finding the Navigational path of Mobile Robot-A Review
- Robot Navigation Using a Brain-Computer Interface
- Path Generation for Robot Navigation using a Single Ceiling Mounted Camera
- Exact Robot Navigation Using Power Diagrams
- Learning Socially Normative Robot Navigation Behaviors with Bayesian Inverse Reinforcement Learning
- Pipelined, High Speed, Low Power Neural Network Controller for Autonomous Mobile Robot Navigation Using FPGA
- Proxemics models for human-aware navigation in robotics: Grounding interaction and personal space models in experimental data from psychology
- Optimality and limit behavior of the ML estimator for Multi-Robot Localization via GPS and Relative Measurements
- Aerial Robotics: Compact groups of cooperating micro aerial vehicles in clustered GPS denied environment
- Disordered and Multiple Destinations Path Planning Methods for Mobile Robot in Dynamic Environment
- Integrating Modeling and Knowledge Representation for Combined Task, Resource and Path Planning in Robotics
- Path Planning With Kinematic Constraints For Robot Groups
- Robot motion planning for pouring liquids
- Implan: Scalable Incremental Motion Planning for Multi-Robot Systems
- Equilibrium Motion Planning of Humanoid Climbing Robot under Constraints
- POMDP-lite for Robust Robot Planning under Uncertainty
- The RoboCup Logistics League as a Benchmark for Planning in Robotics
- Planning-aware communication for decentralised multi- robot coordination
- Combined Force and Position Controller Based on Inverse Dynamics: Application to Cooperative Robotics
- A Four Degree of Freedom Robot for Positioning Ultrasound Imaging Catheters
- The Role of Robotics in Ovarian Transposition
- An Implementation on 3D Positioning Aquatic Robot
Robotic Interactions
- On Indexicality, Direction of Arrival of Sound Sources and Human-Robot Interaction
- OpenWoZ: A Runtime-Configurable Wizard-of-Oz Framework for Human-Robot Interaction
- Privacy in Human-Robot Interaction: Survey and Future Work
- An Analysis Of Teacher-Student Interaction Patterns In A Robotics Course For Kindergarten Children: A Pilot Study
- Human Robotics Interaction (HRI) based Analysis–using DMT
- A Cautionary Note on Personality (Extroversion) Assessments in Child-Robot Interaction Studies
- Interaction as a bridge between cognition and robotics
- State Representation Learning in Robotics: Using Prior Knowledge about Physical Interaction
- Eliciting Conversation in Robot Vehicle Interactions
- A Comparison of Avatar, Video, and Robot-Mediated Interaction on Users’ Trust in Expertise
- Exercising with Baxter: Design and Evaluation of Assistive Social-Physical Human- Robot Interaction
- Using Narrative to Enable Longitudinal Human- Robot Interactions
- Computational Analysis of Affect, Personality, and Engagement in HumanRobot Interactions
- Human-robot interactions: A psychological perspective
- Gait of Quadruped Robot and Interaction Based on Gesture Recognition
- Graphically representing child- robot interaction proxemics
- Interactive Demo of the SOPHIA Project: Combining Soft Robotics and Brain-Machine Interfaces for Stroke Rehabilitation
- Interactive Robotics Workshop
- Activating Robotics Manipulator using Eye Movements
- Wireless Controlled Robot Movement System Desgined using Microcontroller
- Gesture Controlled Robot using LabVIEW
- RoGuE: Robot Gesture Engine
Obstacle Avoidance
- Low Cost Obstacle Avoidance Robot with Logic Gates and Gate Delay Calculations
- Advanced Fuzzy Potential Field Method for Mobile Robot Obstacle Avoidance
- Controlling Obstacle Avoiding And Live Streaming Robot Using Chronos Watch
- Movement Of The Space Robot Manipulator In Environment With Obstacles
- Assis-Cicerone Robot With Visual Obstacle Avoidance Using a Stack of Odometric Data.
- Obstacle detection and avoidance methods for autonomous mobile robot
- Moving Domestic Robotics Control Method Based on Creating and Sharing Maps with Shortest Path Findings and Obstacle Avoidance
- Control of the Differentially-driven Mobile Robot in the Environment with a Non-Convex Star-Shape Obstacle: Simulation and Experiments
- A survey of typical machine learning based motion planning algorithms for robotics
- Linear Algebra for Computer Vision, Robotics , and Machine Learning
- Applying Radical Constructivism to Machine Learning: A Pilot Study in Assistive Robotics
- Machine Learning for Robotics and Computer Vision: Sampling methods and Variational Inference
- Rule-Based Supervisor and Checker of Deep Learning Perception Modules in Cognitive Robotics
- The Limits and Potentials of Deep Learning for Robotics
- Autonomous Robotics and Deep Learning
- A Unified Knowledge Representation System for Robot Learning and Dialogue
Computer Vision
- Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot
- Non-Euclidean manifolds in robotics and computer vision: why should we care?
- Topology of singular surfaces, applications to visualization and robotics
- On the Impact of Learning Hierarchical Representations for Visual Recognition in Robotics
- Focused Online Visual-Motor Coordination for a Dual-Arm Robot Manipulator
- Towards Practical Visual Servoing in Robotics
- Visual Pattern Recognition In Robotics
- Automated Visual Inspection: Position Identification of Object for Industrial Robot Application based on Color and Shape
- Automated Creation of Augmented Reality Visualizations for Autonomous Robot Systems
- Implementation of Efficient Night Vision Robot on Arduino and FPGA Board
- On the Relationship between Robotics and Artificial Intelligence
- Artificial Spatial Cognition for Robotics and Mobile Systems: Brief Survey and Current Open Challenges
- Artificial Intelligence, Robotics and Its Impact on Society
- The Effects of Artificial Intelligence and Robotics on Business and Employment: Evidence from a survey on Japanese firms
- Artificially Intelligent Maze Solver Robot
- Artificial intelligence, Cognitive Robotics and Human Psychology
- Minecraft as an Experimental World for AI in Robotics
- Impact of Robotics, RPA and AI on the insurance industry: challenges and opportunities
Probabilistic Programming
- On the use of probabilistic relational affordance models for sequential manipulation tasks inrobotics
- Exploration strategies in developmental robotics: a unified probabilistic framework
- Probabilistic Programming for Robotics
- New design of a soft-robotics wearable elbow exoskeleton based on Shape Memory Alloy wires actuators
- Design of a Modular Series Elastic Upgrade to a Robotics Actuator
- Applications of Compliant Actuators to Wearing Robotics for Lower Extremity
- Review of Development Stages in the Conceptual Design of an Electro-Hydrostatic Actuator for Robotics
- Fluid electrodes for submersible robotics based on dielectric elastomer actuators
- Cascaded Control Of Compliant Actuators In Friendly Robotics
Collaborative Robotics
- Interpretable Models for Fast Activity Recognition and Anomaly Explanation During Collaborative Robotics Tasks
- Collaborative Work Management Using SWARM Robotics
- Collaborative Robotics : Assessment of Safety Functions and Feedback from Workers, Users and Integrators in Quebec
- Accessibility, Making and Tactile Robotics : Facilitating Collaborative Learning and Computational Thinking for Learners with Visual Impairments
- Trajectory Adaptation of Robot Arms for Head-pose Dependent Assistive Tasks
Mobile Robotics
- Experimental research of proximity sensors for application in mobile robotics in greenhouse environment.
- Multispectral Texture Mapping for Telepresence and Autonomous Mobile Robotics
- A Smart Mobile Robot to Detect Abnormalities in Hazardous Zones
- Simulation of nonlinear filter based localization for indoor mobile robot
- Integrating control science in a practical mobile robotics course
- Experimental Study of the Performance of the Kinect Range Camera for Mobile Robotics
- Planification of an Optimal Path for a Mobile Robot Using Neural Networks
- Security of Networking Control System in Mobile Robotics (NCSMR)
- Vector Maps in Mobile Robotics
- An Embedded System for a Bluetooth Controlled Mobile Robot Based on the ATmega8535 Microcontroller
- Experiments of NDT-Based Localization for a Mobile Robot Moving Near Buildings
- Hardware and Software Co-design for the EKF Applied to the Mobile Robotics Localization Problem
- Design of a SESLogo Program for Mobile Robot Control
- An Improved Ekf-Slam Algorithm For Mobile Robot
- Intelligent Vehicles at the Mobile Robotics Laboratory, University of Sao Paolo, Brazil [ITS Research Lab]
- Introduction to Mobile Robotics
- Miniature Piezoelectric Mobile Robot driven by Standing Wave
- Mobile Robot Floor Classification using Motor Current and Accelerometer Measurements
- Sensors for Robotics 2015
- An Automated Sensing System for Steel Bridge Inspection Using GMR Sensor Array and Magnetic Wheels of Climbing Robot
- Sensors for Next-Generation Robotics
- Multi-Robot Sensor Relocation To Enhance Connectivity In A WSN
- Automated Irrigation System Using Robotics and Sensors
- Design Of Control System For Articulated Robot Using Leap Motion Sensor
- Automated configuration of vision sensor systems for industrial robotics
Nano robotics
- Light Robotics: an all-optical nano-and micro-toolbox
- Light-driven Nano- robotics
- Light-driven Nano-robotics
- Light Robotics: a new tech–nology and its applications
- Light Robotics: Aiming towards all-optical nano-robotics
- NanoBiophotonics Appli–cations of Light Robotics
- System Level Analysis for a Locomotive Inspection Robot with Integrated Microsystems
- High-Dimensional Robotics at the Nanoscale Kino-Geometric Modeling of Proteins and Molecular Mechanisms
- A Study Of Insect Brain Using Robotics And Neural Networks
Social Robotics
- Integrative Social Robotics Hands-On
- ProCRob Architecture for Personalized Social Robotics
- Definitions and Metrics for Social Robotics, along with some Experience Gained in this Domain
- Transmedia Choreography: Integrating Multimodal Video Annotation in the Creative Process of a Social Robotics Performance Piece
- Co-designing with children: An approach to social robot design
- Toward Social Cognition in Robotics: Extracting and Internalizing Meaning from Perception
- Human Centered Robotics : Designing Valuable Experiences for Social Robots
- Preliminary system and hardware design for Quori, a low-cost, modular, socially interactive robot
- Socially assistive robotics: Human augmentation versus automation
- Tega: A Social Robot
Humanoid robot
- Compliance Control and Human-Robot Interaction – International Journal of Humanoid Robotics
- The Design of Humanoid Robot Using C# Interface on Bluetooth Communication
- An Integrated System to approach the Programming of Humanoid Robotics
- Humanoid Robot Slope Gait Planning Based on Zero Moment Point Principle
- Literature Review Real-Time Vision-Based Learning for Human-Robot Interaction in Social Humanoid Robotics
- The Roasted Tomato Challenge for a Humanoid Robot
- Remotely teleoperating a humanoid robot to perform fine motor tasks with virtual reality
Cloud Robotics
- CR3A: Cloud Robotics Algorithms Allocation Analysis
- Cloud Computing and Robotics for Disaster Management
- ABHIKAHA: Aerial Collision Avoidance in Quadcopter using Cloud Robotics
- The Evolution Of Cloud Robotics: A Survey
- Sliding Autonomy in Cloud Robotics Services for Smart City Applications
- CORE: A Cloud-based Object Recognition Engine for Robotics
- A Software Product Line Approach for Configuring Cloud Robotics Applications
- Cloud robotics and automation: A survey of related work
- ROCHAS: Robotics and Cloud-assisted Healthcare System for Empty Nester
Swarm Robotics
- Evolution of Task Partitioning in Swarm Robotics
- GESwarm: Grammatical Evolution for the Automatic Synthesis of Collective Behaviors in Swarm Robotics
- A Concise Chronological Reassess Of Different Swarm Intelligence Methods With Multi Robotics Approach
- The Swarm/Potential Model: Modeling Robotics Swarms with Measure-valued Recursions Associated to Random Finite Sets
- The TAM: ABSTRACTing complex tasks in swarm robotics research
- Task Allocation in Foraging Robot Swarms: The Role of Information Sharing
- Robotics on the Battlefield Part II
- Implementation Of Load Sharing Using Swarm Robotics
- An Investigation of Environmental Influence on the Benefits of Adaptation Mechanisms in Evolutionary Swarm Robotics
Soft Robotics
- Soft Robotics: The Next Generation of Intelligent Machines
- Soft Robotics: Transferring Theory to Application,” Soft Components for Soft Robots”
- Advances in Soft Computing, Intelligent Robotics and Control
- The BRICS Component Model: A Model-Based Development Paradigm For ComplexRobotics Software Systems
- Soft Mechatronics for Human-Friendly Robotics
- Seminar Soft-Robotics
- Special Issue on Open Source Software-Supported Robotics Research.
- Soft Brain-Machine Interfaces for Assistive Robotics: A Novel Control Approach
- Towards A Robot Hardware ABSTRACT ion Layer (R-HAL) Leveraging the XBot Software Framework
Service Robotics
- Fundamental Theories and Practice in Service Robotics
- Natural Language Processing in Domestic Service Robotics
- Localization and Mapping for Service Robotics Applications
- Designing of Service Robot for Home Automation-Implementation
- Benchmarking Speech Understanding in Service Robotics
- The Cognitive Service Robotics Apartment
- Planning with Task-oriented Knowledge Acquisition for A Service Robot
- Cognitive Robotics
- Meta-Morphogenesis theory as background to Cognitive Robotics and Developmental Cognitive Science
- Experience-based Learning for Bayesian Cognitive Robotics
- Weakly supervised strategies for natural object recognition in robotics
- Robotics-Derived Requirements for the Internet of Things in the 5G Context
- A Comparison of Modern Synthetic Character Design and Cognitive Robotics Architecture with the Human Nervous System
- PREGO: An Action Language for Belief-Based Cognitive Robotics in Continuous Domains
- The Role of Intention in Cognitive Robotics
- On Cognitive Learning Methodologies for Cognitive Robotics
- Relational Enhancement: A Framework for Evaluating and Designing Human-RobotRelationships
- A Fog Robotics Approach to Deep Robot Learning: Application to Object Recognition and Grasp Planning in Surface Decluttering
- Spatial Cognition in Robotics
- IOT Based Gesture Movement Recognize Robot
- Deliberative Systems for Autonomous Robotics: A Brief Comparison Between Action-oriented and Timelines-based Approaches
- Formal Modeling and Verification of Dynamic Reconfiguration of Autonomous RoboticsSystems
- Robotics on its feet: Autonomous Climbing Robots
- Implementation of Autonomous Metal Detection Robot with Image and Message Transmission using Cell Phone
- Toward autonomous architecture: The convergence of digital design, robotics, and the built environment
- Advances in Robotics Automation
- Data-centered Dependencies and Opportunities for Robotics Process Automation in Banking
- On the Combination of Gamification and Crowd Computation in Industrial Automation and Robotics Applications
- Advances in RoboticsAutomation
- Meshworm With Segment-Bending Anchoring for Colonoscopy. IEEE ROBOTICS AND AUTOMATION LETTERS. 2 (3) pp: 1718-1724.
- Recent Advances in Robotics and Automation
- Key Elements Towards Automation and Robotics in Industrialised Building System (IBS)
- Knowledge Building, Innovation Networks, and Robotics in Math Education
- The potential of a robotics summer course On Engineering Education
- Robotics as an Educational Tool: Impact of Lego Mindstorms
- Effective Planning Strategy in Robotics Education: An Embodied Approach
- An innovative approach to School-Work turnover programme with Educational Robotics
- The importance of educational robotics as a precursor of Computational Thinking in early childhood education
- Pedagogical Robotics A way to Experiment and Innovate in Educational Teaching in Morocco
- Learning by Making and Early School Leaving: an Experience with Educational Robotics
- Robotics and Coding: Fostering Student Engagement
- Computational Thinking with Educational Robotics
- New Trends In Education Of Robotics
- Educational robotics as an instrument of formation: a public elementary school case study
- Developmental Situation and Strategy for Engineering Robot Education in China University
- Towards the Humanoid Robot Butler
- YAGI-An Easy and Light-Weighted Action-Programming Language for Education and Research in Artificial Intelligence and Robotics
- Simultaneous Tracking and Reconstruction (STAR) of Objects and its Application in Educational Robotics Laboratories
- The importance and purpose of simulation in robotics
- An Educational Tool to Support Introductory Robotics Courses
- Lollybot: Where Candy, Gaming, and Educational Robotics Collide
- Assessing the Impact of an Autonomous Robotics Competition for STEM Education
- Educational robotics for promoting 21st century skills
- New Era for Educational Robotics: Replacing Teachers with a Robotic System to Teach Alphabet Writing
- Robotics as a Learning Tool for Educational Transformation
- The Herd of Educational Robotic Devices (HERD): Promoting Cooperation in RoboticsEducation
- Robotics in physics education: fostering graphing abilities in kinematics
- Enabling Rapid Prototyping in K-12 Engineering Education with BotSpeak, a UniversalRobotics Programming Language
- Innovating in robotics education with Gazebo simulator and JdeRobot framework
- How to Support Students’ Computational Thinking Skills in Educational Robotics Activities
- Educational Robotics At Lower Secondary School
- Evaluating the impact of robotics in education on pupils’ skills and attitudes
- Imagining, Playing, and Coding with KIBO: Using Robotics to Foster Computational Thinking in Young Children
- How Does a First LEGO League Robotics Program Provide Opportunities for Teaching Children 21st Century Skills
- A Software-Based Robotic Vision Simulator For Use In Teaching Introductory Robotics Courses
- Robotics Practical
- A project-based strategy for teaching robotics using NI’s embedded-FPGA platform
- Teaching a Core CS Concept through Robotics
- Ms. Robot Will Be Teaching You: Robot Lecturers in Four Modes of Automated Remote Instruction
- Robotic Competitions: Teaching Robotics and Real-Time Programming with LEGO Mindstorms
- Visegrad Robotics Workshop-different ideas to teach and popularize robotics
- LEGO® Mindstorms® EV3 Robotics Instructor Guide
- DRAFT: for Automaatiop iv t22 MOKASIT: Multi Camera System for Robotics Monitoring and Teaching
- MOKASIT: Multi Camera System for Robotics Monitoring and Teaching
- Autonomous Robot Design and Build: Novel Hands-on Experience for Undergraduate Students
- Semi-Autonomous Inspection Robot
- Sumo Robot Competition
- Engagement of students with Robotics-Competitions-like projects in a PBL Bsc Engineering course
- Robo Camp K12 Inclusive Outreach Program: A three-step model of Effective Introducing Middle School Students to Computer Programming and Robotics
- The Effectiveness of Robotics Competitions on Students’ Learning of Computer Science
- Engaging with Mathematics: How mathematical art, robotics and other activities are used to engage students with university mathematics and promote
- Design Elements of a Mobile Robotics Course Based on Student Feedback
- Sixth-Grade Students’ Motivation and Development of Proportional Reasoning Skills While Completing Robotics Challenges
- Student Learning of Computational Thinking in A Robotics Curriculum: Transferrable Skills and Relevant Factors
- A Robotics-Focused Instructional Framework for Design-Based Research in Middle School Classrooms
- Transforming a Middle and High School Robotics Curriculum
- Geometric Algebra for Applications in Cybernetics: Image Processing, Neural Networks, Robotics and Integral Transforms
- Experimenting and validating didactical activities in the third year of primary school enhanced by robotics technology
Construction
- Bibliometric analysis on the status quo of robotics in construction
- AtomMap: A Probabilistic Amorphous 3D Map Representation for Robotics and Surface Reconstruction
- Robotic Design and Construction Culture: Ethnography in Osaka University’s Miyazaki Robotics Lab
- Infrastructure Robotics: A Technology Enabler for Lunar In-Situ Resource Utilization, Habitat Construction and Maintenance
- A Planar Robot Design And Construction With Maple
- Robotics and Automations in Construction: Advanced Construction and FutureTechnology
- Why robotics in mining
- Examining Influences on the Evolution of Design Ideas in a First-Year Robotics Project
- Mining Robotics
- TIRAMISU: Technical survey, close-in-detection and disposal mine actions in Humanitarian Demining: challenges for Robotics Systems
- Robotics for Sustainable Agriculture in Aquaponics
- Design and Fabrication of Crop Analysis Agriculture Robot
- Enhance Multi-Disciplinary Experience for Agriculture and Engineering Students with Agriculture Robotics Project
- Work in progress: Robotics mapping of landmine and UXO contaminated areas
- Robot Based Wireless Monitoring and Safety System for Underground Coal Mines using Zigbee Protocol: A Review
- Minesweepers uses robotics’ awesomeness to raise awareness about landminesexplosive remnants of war
- Intelligent Autonomous Farming Robot with Plant Disease Detection using Image Processing
- Auotomatic Pick And Place Robot
- Video Prompting to Teach Robotics and Coding to Students with Autism Spectrum Disorder
- Bilateral Anesthesia Mumps After RobotAssisted Hysterectomy Under General Anesthesia: Two Case Reports
- Future Prospects of Artificial Intelligence in Robotics Software, A healthcare Perspective
- Designing new mechanism in surgical robotics
- Open-Source Research Platforms and System Integration in Modern Surgical Robotics
- Soft Tissue Robotics–The Next Generation
- CORVUS Full-Body Surgical Robotics Research Platform
- OP: Sense, a rapid prototyping research platform for surgical robotics
- Preoperative Planning Simulator with Haptic Feedback for Raven-II Surgical Robotics Platform
- Origins of Surgical Robotics: From Space to the Operating Room
- Accelerometer Based Wireless Gesture Controlled Robot for Medical Assistance using Arduino Lilypad
- The preliminary results of a force feedback control for Sensorized Medical Robotics
- Medical robotics Regulatory, ethical, and legal considerations for increasing levels of autonomy
- Robotics in General Surgery
- Evolution Of Minimally Invasive Surgery: Conventional Laparoscopy Torobotics
- Robust trocar detection and localization during robot-assisted endoscopic surgery
- How can we improve the Training of Laparoscopic Surgery thanks to the Knowledge in Robotics
- Discussion on robot-assisted laparoscopic cystectomy and Ileal neobladder surgery preoperative care
- Robotics in Neurosurgery: Evolution, Current Challenges, and Compromises
- Hybrid Rendering Architecture for Realtime and Photorealistic Simulation of Robot-Assisted Surgery
- Robotics, Image Guidance, and Computer-Assisted Surgery in Otology/Neurotology
- Neuro-robotics model of visual delusions
- Neuro-Robotics
- Robotics in the Rehabilitation of Neurological Conditions
- What if a Robot Could Help Me Care for My Parents
- A Robot to Provide Support in Stigmatizing Patient-Caregiver Relationships
- A New Skeleton Model and the Motion Rhythm Analysis for Human Shoulder Complex Oriented to Rehabilitation Robotics
- Towards Rehabilitation Robotics: Off-The-Shelf BCI Control of Anthropomorphic Robotic Arms
- Rehabilitation Robotics 2013
- Combined Estimation of Friction and Patient Activity in Rehabilitation Robotics
- Brain, Mind and Body: Motion Behaviour Planning, Learning and Control in view of Rehabilitation and Robotics
- Reliable Robotics – Diagnostics
- Robotics for Successful Ageing
- Upper Extremity Robotics Exoskeleton: Application, Structure And Actuation
Defence and Military
- Voice Guided Military Robot for Defence Application
- Design and Control of Defense Robot Based On Virtual Reality
- AI, Robotics and Cyber: How Much will They Change Warfare
- BORDER SECURITY ROBOT
- Brain Controlled Robot for Indian Armed Force
- Autonomous Military Robotics
- Wireless Restrained Military Discoursed Robot
- Bomb Detection And Defusion In Planes By Application Of Robotics
- Impacts Of The Robotics Age On Naval Force Design, Effectiveness, And Acquisition
Space Robotics
- Lego robotics teacher professional learning
- New Planar Air-bearing Microgravity Simulator for Verification of Space Robotics Numerical Simulations and Control Algorithms
- The Artemis Rover as an Example for Model Based Engineering in Space Robotics
- Rearrangement planning using object-centric and robot-centric action spaces
- Model-based Apprenticeship Learning for Robotics in High-dimensional Spaces
- Emergent Roles, Collaboration and Computational Thinking in the Multi-Dimensional Problem Space of Robotics
- Reaction Null Space of a multibody system with applications in robotics
Other Industries
- Robotics in clothes manufacture
- Recent Trends in Robotics and Computer Integrated Manufacturing: An Overview
- Application Of Robotics In Dairy And Food Industries: A Review
- Architecture for theatre robotics
- Human-multi-robot team collaboration for efficent warehouse operation
- A Robot-based Application for Physical Exercise Training
- Application Of Robotics In Oil And Gas Refineries
- Implementation of Robotics in Transmission Line Monitoring
- Intelligent Wireless Fire Extinguishing Robot
- Monitoring and Controlling of Fire Fighthing Robot using IOT
- Robotics An Emerging Technology in Dairy Industry
- Robotics and Law: A Survey
- Increasing ECE Student Excitement through an International Marine Robotics Competition
- Application of Swarm Robotics Systems to Marine Environmental Monitoring
Future of Robotics / Trends
- The future of Robotics Technology
- RoboticsAutomation Are Killing Jobs A Roadmap for the Future is Needed
- The next big thing (s) in robotics
- Robotics in Indian Industry-Future Trends
- The Future of Robot Rescue Simulation Workshop
- PreprintQuantum Robotics: Primer on Current Science and Future Perspectives
- Emergent Trends in Robotics and Intelligent Systems
RELATED ARTICLES MORE FROM AUTHOR
The use of robotics in shipwreck discovery, how to solve social and ethical challenges in robotics and ai [updated], bioinspired robots – top 25 robots inspired by animals, adaptive robots: the next wave transforming industrial automation, top robotics research institutes and centers in japan, makeblock’s mbot2 rover robotics kit: transforming stem education, best robotics research institutions and labs in greece.
- Privacy Policy
- Terms & Conditions
- Email Alert
论文 全文 图 表 新闻
- Abstracting/Indexing
- Journal Metrics
- Current Editorial Board
- Early Career Advisory Board
- Previous Editor-in-Chief
- Past Issues
- Current Issue
- Special Issues
- Early Access
- Online Submission
- Information for Authors
- Share facebook twitter google linkedin

IEEE/CAA Journal of Automatica Sinica
- JCR Impact Factor: 15.3 , Top 1 (SCI Q1) CiteScore: 23.5 , Top 2% (Q1) Google Scholar h5-index: 77, TOP 5
| Y. Tong, H. Liu, and Z. Zhang, “Advancements in humanoid robots: A comprehensive review and future prospects,” , vol. 11, no. 2, pp. 301–328, Feb. 2024. doi: |
| Y. Tong, H. Liu, and Z. Zhang, “Advancements in humanoid robots: A comprehensive review and future prospects,” , vol. 11, no. 2, pp. 301–328, Feb. 2024. doi: |
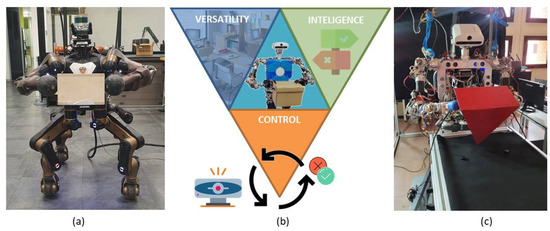
Advancements in Humanoid Robots: A Comprehensive Review and Future Prospects
Doi: 10.1109/jas.2023.124140.
- Yuchuang Tong , , ,
- Haotian Liu , ,
- Zhengtao Zhang , ,
Yuchuang Tong (Member, IEEE) received the Ph.D. degree in mechatronic engineering from the State Key Laboratory of Robotics, Shenyang Institute of Automation (SIA), Chinese Academy of Sciences (CAS) in 2022. Currently, she is an Assistant Professor with the Institute of Automation, Chinese Academy of Sciences. Her research interests include humanoid robots, robot control and human-robot interaction. Dr. Tong has authored more than ten publications in journals and conference proceedings in the areas of her research interests. She was the recipient of the Best Paper Award from 2020 International Conference on Robotics and Rehabilitation Intelligence, the Dean’s Award for Excellence of CAS and the CAS Outstanding Doctoral Dissertation
Haotian Liu received the B.Sc. degree in traffic equipment and control engineering from Central South University in 2021. He is currently a Ph.D. candidate in control science and control engineering at the CAS Engineering Laboratory for Industrial Vision and Intelligent Equipment Technology, Institute of Automation, Chinese Academy of Sciences (IACAS) and University of Chinese Academy of Sciences (UCAS). His research interests include robotics, intelligent control and machine learning
Zhengtao Zhang (Member, IEEE) received the B.Sc. degree in automation from the China University of Petroleum in 2004, the M.Sc. degree in detection technology and automatic equipment from the Beijing Institute of Technology in 2007, and the Ph.D. degree in control science and engineering from the Institute of Automation, Chinese Academy of Sciences in 2010. He is currently a Professor with the CAS Engineering Laboratory for Industrial Vision and Intelligent Equipment Technology, IACAS. His research interests include industrial vision inspection, and intelligent robotics
- Corresponding author: Yuchuang Tong, e-mail: [email protected] ; Zhengtao Zhang, e-mail: [email protected]
- Accepted Date: 2023-11-26
This paper provides a comprehensive review of the current status, advancements, and future prospects of humanoid robots, highlighting their significance in driving the evolution of next-generation industries. By analyzing various research endeavors and key technologies, encompassing ontology structure, control and decision-making, and perception and interaction, a holistic overview of the current state of humanoid robot research is presented. Furthermore, emerging challenges in the field are identified, emphasizing the necessity for a deeper understanding of biological motion mechanisms, improved structural design, enhanced material applications, advanced drive and control methods, and efficient energy utilization. The integration of bionics, brain-inspired intelligence, mechanics, and control is underscored as a promising direction for the development of advanced humanoid robotic systems. This paper serves as an invaluable resource, offering insightful guidance to researchers in the field, while contributing to the ongoing evolution and potential of humanoid robots across diverse domains.
- Future trends and challenges ,
- humanoid robots ,
- human-robot interaction ,
- key technologies ,
- potential applications
| [1] | , vol. 4, no. 26, p. eaaw3520, Jan. 2019. doi: |
| [2] | , vol. 610, no. 7931, pp. 283–289, Oct. 2022. doi: |
| [3] | , New Delhi, India, 2019, pp. 1–6. |
| [4] | , vol. 6, no. 54, p. eabd9461, May 2021. doi: |
| [5] | , vol. 39, no. 4, pp. 3332–3346, 2023. doi: |
| [6] | , vol. 23, no. 3, p. 1506, Jan. 2023. doi: |
| [7] | , vol. 15, no. 2, pp. 419–433, Jun. 2023. doi: |
| [8] | , vol. 8, no. 10, pp. 6435–6442, Oct. 2023. doi: |
| [9] | , vol. 34, p. e20, Dec. 2019. doi: |
| [10] | , vol. 16, no. 2, Apr. 2019. |
| [11] | , vol. 11, no. 4, pp. 555–573, Feb. 2019. doi: |
| [12] | . Dordrecht, The Netherlands: Springer, 2019. |
| [13] | . 2nd ed. Cham, Germany: Springer, 2016. |
| [14] | , vol. 10, no. 1, p. 5489, Dec. 2019. doi: |
| [15] | , Coimbatore, India, 2018, pp. 555–560. |
| [16] | , vol. 65, no. 3, pp. 147–159, Jul. 1991. doi: |
| [17] | , vol. 115, no. 5, pp. 431–438, Oct. 2021. doi: |
| [18] | , vol. 6, no. 2, pp. 159–168, Apr. 2002. doi: |
| [19] | , Daejeon, South Korea, 2008, pp. 155–160. |
| [20] | , vol. 29, no. 4, p. 73, Jul. 2010. |
| [21] | , vol. 48, no. 11, pp. 2919–2924, Aug. 2015. doi: |
| [22] | ( ), vol. 42, no. 5, pp. 728–743, Sept. 2012. doi: |
| [23] | , vol. 41, pp. 147–155, May 2013. doi: |
| [24] | , Tehran, Iran, 2019, pp. 498–503. |
| [25] | , vol. 34, no. 21–22, pp. 1338–1352, Jun. 2020. doi: |
| [26] | , vol. 34, no. 21–22, pp. 1370–1379, Aug. 2020. doi: |
| [27] | , Shenzhen, China, 2013, pp. 1276–1281. |
| [28] | , vol. 47, no. 2-3, pp. 129–141, Jun. 2004. doi: |
| [29] | , vol. 13, no. 12, pp. 3835–3851, Dec. 2020. |
| [30] | , vol. 39, no. 3, pp. 1706–1727, Jun. 2023. doi: |
| [31] | , vol. 3, no. 2, pp. 93–100, Jun. 1984. doi: |
| [32] | , Stuttgart, Germany, 2018, pp. 97–102. |
| [33] | , Taipei, China, 2010, pp. 3617–3622. |
| [34] | , Long Beach, USA, 2005, pp. 167–173. |
| [35] | , vol. 365, no. 1850, pp. 11–19, Jan. 2007. |
| [36] | , Nagoya, Japan, 2004, pp. 23–28. |
| [37] | , London, UK, 2000, pp. 285–293. |
| [38] | , Kobe, Japan, 2003, pp. 938–943. |
| [39] | , Beijing, China, 2006, pp. 1428–1433. |
| [40] | , Lausanne, Switzerland, 2002, pp. 2478–2483. |
| [41] | , vol. 43, no. 3, pp. 253–270, Mar. 2008. doi: |
| [42] | , vol. 40, no. 3, pp. 429–455, Mar. 2016. doi: |
| [43] | , vol. 46, pp. 1441–1448, Dec. 2015. doi: |
| [44] | , vol. 30, no. 4, pp. 372–377, May 2012. doi: |
| [45] | , Hong Kong, China, 2014, pp. 5983–5989. |
| [46] | , vol. 7, p. 62, May 2020. doi: |
| [47] | , 2023. DOI: |
| [48] | , vol. 52, no. 10, pp. 11267–11280, Oct. 2022. doi: |
| [49] | , vol. 20, no. 1, pp. 1–18, Jan. 2023. doi: |
| [50] | , vol. 27, no. 5, pp. 3463–3473, Oct. 2022. doi: |
| [51] | humanoid robot: An open-systems platform for research in cognitive development,” , vol. 23, no. 8–9, pp. 1125–1134, Oct.–Nov. 2010. doi: |
| [52] | , vol. 21, no. 10, pp. 1151–1175, Oct. 2007. doi: |
| [53] | , vol. 55, no. 5, pp. 2111–2120, May 2008. doi: |
| [54] | , vol. 36, no. 2, pp. 517–536, Apr. 2020. doi: |
| [55] | , vol. 31, no. 9, pp. 1094–1113, Jul. 2012. doi: |
| [56] | , vol. 32, no. 9, pp. 4013–4025, Sept. 2021. doi: |
| [57] | , vol. 7, no. 65, p. eabm6010, Apr. 2022. doi: |
| [58] | , vol. 35, no. 1, pp. 78–94, Feb. 2019. doi: |
| [59] | , vol. 26, no. 5, pp. 2700–2711, Oct. 2021. doi: |
| [60] | , vol. 67, no. 8, pp. 6629–6638, Aug. 2020. doi: |
| [61] | , vol. 7, no. 2, pp. 2977–2984, Apr. 2022. doi: |
| [62] | , vol. 29, no. 5, pp. 412–419, Oct. 2002. doi: |
| [63] | , Pasadena, USA, 2008, pp. 905–910. |
| [64] | , Busan, South Korea, 2006, pp. I-31–I-34. |
| [65] | , Orlando, USA, 2006, pp. 76–81. |
| [66] | , New Orleans, USA, 2004, pp. 1083–1090. |
| [67] | , Montreal, Canada, 2019, pp. 277–283. |
| [68] | , C. Pradalier, R. Siegwart, and G. Hirzinger, Eds. Berlin, Heidelberg, Germany: Springer, 2011, pp. 301–314. |
| [69] | , vol. 4, no. 2, pp. 1431–1438, Apr. 2019. doi: |
| [70] | , Vilamoura-Algarve, Portugal, 2012, pp. 3687–3692. |
| [71] | , Tokyo, Japan, 2013, pp. 935–940. |
| [72] | , Osaka, Japan, 2012, pp. 1–6. |
| [73] | , vol. 35, no. S2, pp. ii24–ii26, Sept. 2006. |
| [74] | , Leuven, Belgium, 1998, pp. 1321–1326. |
| [75] | , vol. 26, no. 4, pp. 260–266, Jun. 1999. doi: |
| [76] | , Barcelona, Spain, 2005, pp. 629–634. |
| [77] | , Osaka, Japan, 2010, pp. 73–74. |
| [78] | , San Diego, USA, 2007, pp. 2578–2579. |
| [79] | , Nice, France, 2008, pp. 779–786. |
| [80] | , Toyama, Japan, 2009, pp. 1125–1130. |
| [81] | , vol. 25, no. 2, pp. 414–425, Apr. 2009. doi: |
| [82] | , Big Sky, USA, 2003, pp. 3939–3947. |
| [83] | , Taipei, China, 2003, pp. 2543–2548. |
| [84] | , Shanghai, China, 2011, pp. 2178–2183. |
| [85] | , vol. 14, no. 2-3, pp. 179–197, Mar. 2003. |
| [86] | , vol. 28, no. 1, pp. 35–42, Feb. 2001. doi: |
| [87] | , Las Vegas, USA, 2020, pp. 3739–3746. |
| [88] | , Philadelphia, USA, 2019, pp. 4559–4566. |
| [89] | , Kansas City, USA, 2016, pp. 340–350. |
| [90] | , vol. 9, no. 12, Dec. 2017. |
| [91] | , Nanjing, China, 2014, pp. 8518–8523. |
| [92] | , Prague, Czech Republic, 2021, pp. 6–9. |
| [93] | , vol. 31, no. 10, pp. 1117–1133, Aug. 2012. doi: |
| [94] | , Orlando, USA, 2008, pp. 69621F. |
| [95] | , vol. 10, no. 1, p. 47, Jan. 2021. |
| [96] | , Edinburgh, UK, 2016, pp. 998602. |
| [97] | , vol. 32, no. 2, pp. 192–208, Mar. 2015. doi: |
| [98] | , Atlanta, USA, 2013, pp. 307–314. |
| [99] | , Tokyo, Japan, 2013, pp. 2479–2484. |
| [100] | , vol. 365, no. 1850, pp. 79–107, Jan. 2007. |
| [101] | , Cancun, Mexico, 2016, pp. 876–883. |
| [102] | , vol. 35, no. 6, pp. 504–506, Oct. 2008. doi: |
| [103] | , vol. 100, no. 8, pp. 2410–2428, Aug. 2012. doi: |
| [104] | , vol. 32, no. 3, pp. 397–419, May 2015. doi: |
| [105] | , Boston, USA, 2012, pp. 391–398. |
| [106] | , vol. 9, no. 4, p. 1250027, Dec. 2012. doi: |
| [107] | , Stockholm, Sweden, 2016, pp. 1817–1824. |
| [108] | , Karlsruhe, Germany, 2013, pp. 673–678. |
| [109] | , Tokyo, Japan, 2013, pp. 4145–4151. |
| [110] | , St. Louis, USA, 2009, pp. 5481–5486. |
| [111] | , A. Morecki, G. Bianchi, and C. Rzymkowski, Eds. Vienna, Austria: Springer, 2000, pp. 307–312. |
| [112] | , vol. 23, no. 2, pp. 74–80, Jun. 2016. doi: |
| [113] | , Daejeon, South Korea, 2008, pp. 477–483. |
| [114] | , Karlsruhe, Germany, 2013, pp. 5253–5258. |
| [115] | , Cluj-Napoca, Romania, 2022, pp. 127–131. |
| [116] | , Koscielisko, Poland, 2017, pp. 1–6. |
| [117] | , Chengdu, China, 2018, pp. 112–117. |
| [118] | , Orlando, USA, 1993, pp. 567–572. |
| [119] | , Seville, Spain, 2002, pp. 2451–2456. |
| [120] | , vol. 53, no. 4, pp. 411–434, Nov. 2021. doi: |
| [121] | , vol. 34, no. 1, pp. 1–17, Feb. 2018. doi: |
| [122] | , vol. 6, no. 8, Jan. 2014. |
| [123] | , vol. 101, pp. 34–44, Mar. 2018. doi: |
| [124] | , Hong Kong, China, 2014, pp. 6212–6217. |
| [125] | , 2001, pp. 164–167. |
| [126] | , vol. 27, no. 3, pp. 223–232, Feb. 2013. doi: |
| [127] | , Kobe, Japan, 2009, pp. 769–774. |
| [128] | , Madrid, Spain, 2014, pp. 959–966. |
| [129] | , Madrid, Spain, 2017, pp. 66–78. |
| [130] | , Seoul, South Korea, 2015, pp. 33–40. |
| [131] | , vol. 55, pp. 38–53, Nov. 2018. doi: |
| [132] | , Tehran, Iran, 2017, pp. 132–137. |
| [133] | , Beijing, China, 2018, pp. 747–754. |
| [134] | , vol. 17, no. 5, p. 2050021, Oct. 2020. doi: |
| [135] | , Kobe, Japan, 2009, pp. 2516–2521. |
| [136] | , Boston, USA, 2012, pp. 417–417. |
| [137] | , Mexico City, Mexico, 2015, pp. 1–6. |
| [138] | , Madrid, Spain, 2014, pp. 916–923. |
| [139] | , Baltimore, USA, 2012, pp. 199–206. |
| [140] | , vol. 10, p. 450, Feb. 2019. doi: |
| [141] | , Naples, Italy, 2019, pp. 445–446. |
| [142] | , Atlanta, USA, 2013, pp. 1–7. |
| [143] | , Catania, Italy, 2003, pp. 485–492. |
| [144] | , Barcelona, Spain, 2005, pp. 1431–1436. |
| [145] | , Tsukuba, Japan, 2005, pp. 135–140. |
| [146] | , Tsukuba, Japan, 2005, pp. 321–326. |
| [147] | , vol. 22, no. 2-3, pp. 159–190, Mar. 2008. doi: |
| [148] | , Taipei, China, 2003, pp. 2472–2477. |
| [149] | , Wuhan, China, 2017, pp. 286–297. |
| [150] | , Shanghai, China, 2002, pp. 1265–1269. |
| [151] | , Pittsburgh, USA, 2007, pp. 577–582. |
| [152] | , vol. 26, no. 1, pp. 109–116, Jan. 2008. doi: |
| [153] | , vol. 36, no. 7, pp. 784–795, Feb. 2019. doi: |
| [154] | , vol. 28, no. 10, p. 103002, Sept. 2019. doi: |
| [155] | , vol. 6, no. 3, p. eaav8219, Jan. 2020. doi: |
| [156] | , vol. 18, no. 4, pp. 764–785, Aug. 2021. doi: |
| [157] | , vol. 53, no. 1, pp. 17–94, Jan. 2020. doi: |
| [158] | , vol. 24, no. 1, pp. 104–121, Feb. 2021. doi: |
| [159] | , vol. 27, no. 3, pp. 574–588, Mar. 2019. doi: |
| [160] | , vol. 9, no. 2, pp. 113–125, Jun. 2001. doi: |
| [161] | , vol. 28, no. 3, p. 60, Aug. 2009. |
| [162] | , vol. 24, no. 4, pp. 532–543, Aug. 2005. doi: |
| [163] | , H. Akiyama, O. Obst, C. Sammut, and F. Tonidandel, Eds. Cham, Germany: Springer, 2018, pp. 423–434. |
| [164] | , vol. 17, no. 1, p. 94, Jan. 2017. doi: |
| [165] | , Portland, USA, 2017, pp. 101631U. |
| [166] | , Paris, France, 2012, pp. 337–344. |
| [167] | , vol. 5, pp. 1–31, May 2022. doi: |
| [168] | , Detroit, USA, 1999, pp. 368–374. |
| [169] | , Washington, USA, 2002, pp. 1404–1409. |
| [170] | , vol. 14, p. 600885, Jan. 2021. doi: |
| [171] | , Singapore, Singapore, 2018, pp. 436–441. |
| [172] | , vol. 8, no. 8, pp. 5031–5038, Aug. 2023. doi: |
| [173] | , vol. 33, no. 5, p. e5999, Mar. 2021. doi: |
| [174] | , Karon Beach, Thailand, 2011, pp. 2241–2242. |
| [175] | , vol. 13, no. 2, p. 77, Mar.–Apr. 2016. doi: |
| [176] | , Vilamoura-Algarve, Portugal, 2012, pp. 4019–4026. |
| [177] | , vol. 13, p. 70, Aug. 2019. doi: |
| [178] | , vol. 6, no. 4, pp. 8261–8268, Oct. 2021. doi: |
| [179] | , vol. 6, no. 4, pp. 8561–8568, Oct. 2021. doi: |
| [180] | , Seoul, South Korea, 2015, pp. 1013–1019. |
| [181] | , vol. 7, no. 2, pp. 2779–2786, Apr. 2022. doi: |
| [182] | , vol. 67, no. 9, p. e17306, Sept. 2021. doi: |
| [183] | , Genova, Italy, 2006, pp. 200–207. |
| [184] | , Taipei, China, 2003, pp. 1620–1626. |
| [185] | , vol. 34, no. 21–22, pp. 1353–1369, Nov. 2020. doi: |
| [186] | , vol. 158, p. 104269, Dec. 2022. doi: |
| [187] | , vol. 31, pp. 17–32, Feb. 2019. doi: |
| [188] | , vol. 51, no. 4, pp. 2332–2341, Apr. 2021. doi: |
| [189] | , vol. 7, no. 3, pp. 8225–8232, Jul. 2022. doi: |
| [190] | , vol. 38, no. 6, p. 206, Dec. 2019. |
| [191] | , M. Diehl and K. Mombaur, Eds. Berlin, Heidelberg, Germany: Springer, 2006, vol. 340, pp. 299–324. |
| [192] | , vol. 32, no. 6, pp. 907–934, Sept. 2014. doi: |
| [193] | , vol. 4, no. 2, pp. 2116–2123, Apr. 2019. doi: |
| [194] | , vol. 18, no. 2, pp. 484–494, Apr. 2021. doi: |
| [195] | , vol. 86, pp. 13–28, Dec. 2016. doi: |
| [196] | , Madrid, Spain, 2018, pp. 8227–8232. |
| [197] | , vol. 31, no. 5, pp. 2231–2244, Sept. 2023. doi: |
| [198] | , vol. 39, no. 2, pp. 905–922, Apr. 2023. doi: |
| [199] | , vol. 8, no. 7, pp. 4307–4314, Jul. 2023. doi: |
| [200] | , vol. 39, no. 4, pp. 3154–3166, Aug. 2023. doi: |
| [201] | , vol. 28, no. 6, pp. 3029–3040, Dec. 2023. doi: |
| [202] | , vol. 8, no. 1, p. 67, Feb. 2023. doi: |
| [203] | , vol. 71, no. 2, pp. 1708–1717, Feb. 2024. doi: |
| [204] | , vol. 11, pp. 20284–20297, Feb. 2023. doi: |
| [205] | , vol. 8, no. 5, pp. 3039–3046, May 2023. doi: |
| [206] | , vol. 34, no. 4, pp. 953–965, Aug. 2018. doi: |
| [207] | , vol. 10, no. 2, pp. 1401–1413, Jan. 2023. doi: |
| [208] | , vol. 28, no. 2, pp. 322–329, Apr. 2023. doi: |
| [209] | , vol. 11, no. 1, p. 1332, Mar. 2020. doi: |
| [210] | , Orlando, USA, 2008, pp. 6–11. |
| [211] | , vol. 7, no. 13, p. 20005484, Jul. 2020. |
| [212] | , vol. 17, no. 7, pp. 4492–4502, Jul. 2021. doi: |
| [213] | , vol. 390, pp. 260–267, May 2020. doi: |
| [214] | , vol. 67, no. 10, pp. 8608–8617, Oct. 2020. doi: |
| [215] | , vol. 29, no. 1, pp. 10–24, Jan. 2018. doi: |
| [216] | , vol. 39, no. 1, pp. 3–20, Jan. 2020. doi: |
| [217] | , vol. 9, no. 3, pp. 318–333, Jun. 2005. doi: |
| [218] | , vol. 55, no. 3, pp. 1444–1452, Mar. 2008. doi: |
| [219] | , vol. 18, no. 3, pp. 1864–1872, Mar. 2022. doi: |
| [220] | , vol. 22, no. 30, pp. 1–82, Jan. 2021. |
| [221] | , vol. 50, no. 10, pp. 3701–3712, Oct. 2020. doi: |
| [222] | , vol. 13, no. 6, pp. 1235–1252, Sept. 2021. doi: |
| [223] | , vol. 3, no. 4, pp. 3247–3254, Oct. 2018. doi: |
| [224] | , Anchorage, USA, 2010, pp. 2369–2374. |
| [225] | , vol. 84, pp. 1–16, Dec. 2016. doi: |
| [226] | , vol. 7, p. 61, Jun. 2020. doi: |
| [227] | , Baltimore, USA, 2022, pp. 8387–8406. |
| [228] | , vol. 4, no. 3, pp. 2407–2414, Jul. 2019. doi: |
| [229] | , vol. 13, no. 1, pp. 105–117, Mar. 2021. doi: |
| [230] | , vol. 13, no. 1, pp. 162–170, Mar. 2021. doi: |
| [231] | , vol. 3, no. 6, pp. 233–242, Jun. 1999. doi: |
| [232] | , vol. 24, no. 3, pp. 1117–1128, Jun. 2019. doi: |
| [233] | , vol. 30, no. 3, pp. 777–787, Mar. 2019. doi: |
| [234] | , vol. 451, pp. 205–214, Sept. 2021. doi: |
| [235] | , vol. 62, no. 10, pp. 1517–1530, Oct. 2014. doi: |
| [236] | , vol. 61, no. 12, pp. 1323–1334, Dec. 2013. doi: |
| [237] | , vol. 21, no. 4, p. 1278, Feb. 2021. doi: |
| [238] | , vol. 77, no. 2, pp. 257–286, Feb. 1989. doi: |
| [239] | , vol. 46, no. 3, pp. 706–717, Mar. 2016. doi: |
| [240] | , Washington, USA, 2002, pp. 1398–1403. |
| [241] | , vol. 38, no. 7, pp. 833–852, May 2019. doi: |
| [242] | , vol. 7, no. 2, pp. 4917–4923, Apr. 2022. doi: |
| [243] | , Honolulu, USA, 2019, pp. 7749–7758. |
| [244] | , Macao, China, 2019, pp. 2692–2700. |
| [245] | , Honolulu, USA, 2017, pp. 1256–1261. |
| [246] | , Portland, USA, 2019, pp. 1536–1540. |
| [247] | , Xiamen, China, 2019, pp. 102–109. |
| [248] | , Stockholm, Sweden, 2018, pp. 2204–2206. |
| [249] | , vol. 2019, p. 4834516, Apr. 2019. |
| [250] | , Canberra, Australia, 2020, pp. 241–249. |
| [251] | , vol. 602, pp. 328–350, Jul. 2022. doi: |
| [252] | , vol. 5, no. 4, pp. 5355–5362, Oct. 2020. doi: |
| [253] | , vol. 63, no. 9, pp. 2787–2802, Sept. 2018. doi: |
| [254] | , New York, USA, 2016, pp. 49–58. |
| [255] | , Stockholm, Sweden, 2016, pp. 512–519. |
| [256] | , vol. 520, pp. 1–14, May 2020. doi: |
| [257] | , vol. 388, pp. 60–69, May 2020. doi: |
| [258] | , Barcelona, Spain, 2016, pp. 4572–4580. |
| [259] | , vol. 457, pp. 365–376, Oct. 2021. doi: |
| [260] | , Baltimore, USA, 2022, pp. 24725–24742. |
| [261] | , vol. 44, no. 10, pp. 6968–6980, Oct. 2022. doi: |
| [262] | , Xi’an, China, 2021, pp. 2797–2803. |
| [263] | , Ginowan, Japan, 2022, pp. 714–721. |
| [264] | , vol. 22, pp. 1–49, Apr. 2021. |
| [265] | , vol. 38, no. 2-3, pp. 126–145, Mar. 2019. doi: |
| [266] | , vol. 26, no. 1, pp. 1–20, Feb. 2010. doi: |
| [267] | , vol. 31, no. 34, p. 1803637, Aug. 2019. doi: |
| [268] | , vol. 20, no. 14, pp. 7525–7531, Jul. 2020. doi: |
| [269] | , vol. 46, no. 15, pp. 23592–23598, Oct. 2020. doi: |
| [270] | , vol. 19, no. 2, pp. 58–71, Jun. 2012. doi: |
| [271] | , Stockholm, Sweden, 2016, pp. 4851–4858. |
| [272] | , Rome, Italy, 2007, pp. 2162–2168. |
| [273] | , New Orleans, USA, 2004, pp. 592–597. |
| [274] | , vol. 33, no. 9, pp. 1251–1270, Aug. 2014. doi: |
| [275] | , vol. 28, no. 2, pp. 427–439, Apr. 2012. doi: |
| [276] | , vol. 29, no. 2, pp. 331–345, Apr. 2013. doi: |
| [277] | , Nagoya Aichi, Japan, 2007, pp. 228–235. |
| [278] | , Barcelona, Spain, 2005, pp. 1066–1071. |
| [279] | ( ), vol. 32, no. 1, pp. 57–65, Feb. 2002. doi: |
| [280] | , vol. 54, no. 12, pp. 1005–1014, Dec. 2006. doi: |
| [281] | , San Diego, USA, 2007, pp. 798–805. |
| [282] | , vol. 13, no. 1, pp. 24–32, Mar. 2005. doi: |
| [283] | , Zurich, Switzerland, 2007, pp. 768–773. |
| [284] | , vol. 6, no. 2, pp. 170–187, Jun. 2001. doi: |
| [285] | , vol. 8, no. 3, pp. 401–409, Sept. 2003. doi: |
| [286] | , Kobe, Japan, 2009, pp. 2972–2978. |
| [287] | , Xi’an, China, 2021, pp. 1622–1628. |
| [288] | , vol. 11, no. 10, pp. 10226–10236, Feb. 2019. doi: |
| [289] | , Kobe, Japan, 2009, pp. 2118–2123. |
| [290] | , Seoul, South Korea, 2015, pp. 610–615. |
| [291] | , Montreal, Canada, 2019, pp. 4303–4309. |
| [292] | , vol. 46, no. 3, pp. 655–667, Mar. 2016. doi: |
| [293] | , vol. 43, no. 5, pp. 535–551, Aug. 2016. doi: |
| [294] | , vol. 51, no. 7, pp. 3824–3835, Jul. 2021. doi: |
| [295] | , vol. 32, p. e1, 2017. doi: |
| [296] | , vol. 34, no. 2, pp. 229–240, Mar. 2017. doi: |
| [297] | , vol. 26, no. 1, pp. 11–17, Feb. 2011. doi: |
| [298] | , New Orleans, USA, 2004, pp. 1713-1718. |
| [299] | , Seoul, South Korea, 2015, pp. 623–630. |
| [300] | , vol. 32, no. 2, pp. 275–292, Mar. 2015. doi: |
| [301] | , vol. 93, pp. 157–163, Apr. 2019. doi: |
| [302] | , vol. 34, no. 5, pp. 518–526, Sept. 2022. doi: |
| [303] | , vol. 29, no. 3, pp. 269–290, Apr. 2020. doi: |
| [304] | , vol. 10, no. 1, p. e033096, 2020. doi: |
| [305] | , vol. 56, no. 4, pp. 535–556, Aug. 2019. doi: |
| [306] | , vol. 24, no. 3, pp. 354–371, Aug. 2021. doi: |
| [307] | , Vienna, Austria, 2017, pp. 332–340. |
| [308] | , vol. 33, no. 4, pp. 507–518, Jul. 2019. doi: |
| [309] | , vol. 32, no. 3, pp. 1367–1383, Apr. 2020. doi: |
| [310] | , vol. 85, p. 104309, Aug. 2021. doi: |
| [311] | , vol. 44, no. 10, pp. 1309–1317, Sept. 2022. doi: |
| [312] | , vol. 8, pp. 75264–75278, Apr. 2020. doi: |
| [313] | , F. De la Prieta, R. Gennari, M. Temperini, T. Di Mascio, P. Vittorini, Z. Kubincova, E. Popescu, D. R. Carneiro, L. Lancia, and A. Addone, Eds. Cham, Germany: Springer, 2022, pp. 217–226. |
| [314] | , vol. 111, p. 103749, Nov. 2020. doi: |
| [315] | , vol. 3, no. 1, p. e000371, Jan. 2019. doi: |
| [316] | , vol. 8, no. 9, pp. 5624–5631, Sept. 2023. doi: |
| [317] | , vol. 8, no. 2, p. 258, Jun. 2023. doi: |
| [318] | , vol. 52, no. 4, pp. 964–974, Mar. 2019. doi: |
| [319] | , vol. 28, no. 5, pp. 1131–1144, Oct. 2012. doi: |
| [320] | , vol. 48, no. 6, pp. 1741–1786, Jan. 2019. doi: |
| [321] | , vol. 4, p. 8, Feb. 2023. doi: |
| [322] | , vol. 5, p. 1, Jan. 2018. doi: |
| [323] | , vol. 32, no. 6, p. 1906171, Feb. 2020. doi: |
| [324] | , vol. 19, no. 5, pp. 3305–3312, Apr. 2019. doi: |
| [325] | , vol. 107, no. 10, pp. 2011–2015, Oct. 2019. doi: |
| [326] | , vol. 107, no. 2, pp. 247–252, Feb. 2019. doi: |
| [327] | , vol. 10, no. 20, p. 2207273, Jul. 2023. doi: |
| [328] | , vol. 298, p. 122111, Jul. 2023. doi: |
| [329] | (MXene) for electronic skin,” , vol. 7, no. 44, pp. 25314–25323, Oct. 2019. doi: |
| [330] | , vol. 20, no. 3, pp. 873–899, May 2023. doi: |
| [331] | , vol. 18, no. 3, pp. 501–533, Jun. 2021. doi: |
| [332] | , vol. 67, no. 5, pp. 3819–3829, May 2020. doi: |
| [333] | , vol. 15, no. 2, pp. 287–300, Apr. 2007. doi: |
| [334] | , vol. 66, no. 10, pp. 7788–7799, Oct. 2019. doi: |
| [335] | , vol. 4, no. 26, p. eaao4900, Jan. 2019. doi: |
| [336] | , vol. 49, no. 12, pp. 4097–4127, Dec. 2019. doi: |
| [337] | , vol. 35, no. 1, pp. 64–77, Feb. 2019. doi: |
| [338] | , Matsue, Japan, 2016, pp. 110–111. |
| [339] | , vol. 118, no. 7, pp. 3862–3886, Mar. 2018. doi: |
| [340] | , vol. 10, no. 4, pp. 61–68, Nov. 2010. doi: |
| [341] | , vol. 146, no. 2, pp. 267–281, May 1946. doi: |
| [342] | , vol. 28, no. 1, pp. 15–23, Feb. 2000. doi: |
| [343] | , vol. 113, no. 19, pp. 6583–6599, Mar. 2009. doi: |
| [344] | , vol. 1, no. 1, p. 18, Jun. 2011. doi: |
| [345] | , vol. 115, no. 15, pp. 7502–7542, Jun. 2015. doi: |
| [346] | , vol. 116, no. 16, pp. 9305–9374, Jul. 2016. doi: |
| [347] | , vol. 93, no. 9, pp. 771–780, Sept. 2017. doi: |
| [348] | , vol. 19, no. 21, p. 4740, Oct. 2019. doi: |
| [349] | , Tampere, Finland, 2020, pp. 1–6. |
| [350] | , Big Sky, USA, 2021, pp. 1-8. |
| [351] | , Madrid, Spain, 2018, pp. 5018–5025. |
| [352] | , vol. 23, no. 7, p. 3625, Mar. 2023. doi: |
| [353] | , vol. 50, no. 4, pp. 699–704, Aug. 2003. doi: |
| [354] | , vol. 22, no. 4, pp. 637–649, Aug. 2006. doi: |
| [355] | , vol. 3, no. 1, pp. 15–25, Jan. 2016. doi: |
| [356] | , vol. 21, no. 24, pp. 7351–7362, Dec. 2017. doi: |
| [357] | , vol. 102, pp. 274–286, Jan. 2020. doi: |
| [358] | , vol. 12, no. 6, pp. 1179–1201, Dec. 2020. doi: |
| [359] | , vol. 7, no. 2, pp. 5520–5527, Apr. 2022. doi: |
| [360] | , vol. 22, no. 3, pp. 724–734, May 2020. doi: |
| [361] | , vol. 90, pp. 308–314, Jan. 2019. doi: |
| [362] | , vol. 25, no. 10, p. 10LT01, Sept. 2016. doi: |
| [363] | , vol. 5, no. 3, pp. 4345–4351, Jul. 2020. doi: |
| [364] | , vol. 5, no. 7, pp. 2190–2208, Jul. 2022. doi: |
| [365] | , vol. 8, no. 8, pp. 5172–5179, Aug. 2023. doi: |
| [366] | , 2023. DOI: |
| [367] | , vol. 27, no. 3, pp. 401–410, Jun. 2011. doi: |
| [368] | , vol. 30, pp. 262–272, Jan. 2014. doi: |
| [369] | , vol. 48, pp. 56–66, May 2018. doi: |
| [370] | , , , vol. 24, no. 5, pp. 294–299, May 2021. doi: |
Proportional views
通讯作者: 陈斌, [email protected]
沈阳化工大学材料科学与工程学院 沈阳 110142
Figures( 7 ) / Tables( 5 )
Article Metrics
- PDF Downloads( 947 )
- Abstract views( 3920 )
- HTML views( 190 )
- The current state, advancements and future prospects of humanoid robots are outlined
- Fundamental techniques including structure, control, learning and perception are investigated
- This paper highlights the potential applications of humanoid robots
- This paper outlines future trends and challenges in humanoid robot research
- Copyright © 2022 IEEE/CAA Journal of Automatica Sinica
- 京ICP备14019135号-24
- E-mail: [email protected] Tel: +86-10-82544459, 10-82544746
- Address: 95 Zhongguancun East Road, Handian District, Beijing 100190, China

Export File

- Figure 1. Historical progression of humanoid robots.
- Figure 2. The mapping knowledge domain of humanoid robots. (a) Co-citation analysis; (b) Country and institution analysis; (c) Cluster analysis of keywords.
- Figure 3. The number of papers varies with each year.
- Figure 4. Research status of humanoid robots
- Figure 5. Comparison of Child-size and Adult-size humanoid robots
- Figure 6. Potential applications of humanoid robots.
- Figure 7. Key technologies of humanoid robots.
Having a machine learning agent interact with its environment requires true unsupervised learning, skill acquisition, active learning, exploration and reinforcement, all ingredients of human learning that are still not well understood or exploited through the supervised approaches that dominate deep learning today. Our goal is to improve robotics via machine learning, and improve machine learning via robotics. We foster close collaborations between machine learning researchers and roboticists to enable learning at scale on real and simulated robotic systems.
Recent Publications
Some of our teams.
We're always looking for more talented, passionate people.

Information
- Author Services
Initiatives
You are accessing a machine-readable page. In order to be human-readable, please install an RSS reader.
All articles published by MDPI are made immediately available worldwide under an open access license. No special permission is required to reuse all or part of the article published by MDPI, including figures and tables. For articles published under an open access Creative Common CC BY license, any part of the article may be reused without permission provided that the original article is clearly cited. For more information, please refer to https://www.mdpi.com/openaccess .
Feature papers represent the most advanced research with significant potential for high impact in the field. A Feature Paper should be a substantial original Article that involves several techniques or approaches, provides an outlook for future research directions and describes possible research applications.
Feature papers are submitted upon individual invitation or recommendation by the scientific editors and must receive positive feedback from the reviewers.
Editor’s Choice articles are based on recommendations by the scientific editors of MDPI journals from around the world. Editors select a small number of articles recently published in the journal that they believe will be particularly interesting to readers, or important in the respective research area. The aim is to provide a snapshot of some of the most exciting work published in the various research areas of the journal.
Original Submission Date Received: .
- Active Journals
- Find a Journal
- Proceedings Series
- For Authors
- For Reviewers
- For Editors
- For Librarians
- For Publishers
- For Societies
- For Conference Organizers
- Open Access Policy
- Institutional Open Access Program
- Special Issues Guidelines
- Editorial Process
- Research and Publication Ethics
- Article Processing Charges
- Testimonials
- Preprints.org
- SciProfiles
- Encyclopedia
Journal Description
- Open Access — free for readers, with article processing charges (APC) paid by authors or their institutions.
- High Visibility: indexed within Scopus , ESCI (Web of Science) , dblp , Inspec , and other databases .
- Journal Rank: JCR - Q2 ( Robotics ) / CiteScore - Q1 (Mechanical Engineering)
- Rapid Publication: manuscripts are peer-reviewed and a first decision is provided to authors approximately 17.7 days after submission; acceptance to publication is undertaken in 2.9 days (median values for papers published in this journal in the first half of 2024).
- Recognition of Reviewers: reviewers who provide timely, thorough peer-review reports receive vouchers entitling them to a discount on the APC of their next publication in any MDPI journal, in appreciation of the work done.
Latest Articles
Journal Menu
- Robotics Home
- Aims & Scope
- Editorial Board
- Reviewer Board
- Topical Advisory Panel
- Instructions for Authors
Special Issues
- Article Processing Charge
- Indexing & Archiving
- Editor’s Choice Articles
- Most Cited & Viewed
- Journal Statistics
- Journal History
- Journal Awards
- Society Collaborations
Conferences
- Editorial Office
Journal Browser
- arrow_forward_ios Forthcoming issue arrow_forward_ios Current issue
- Vol. 13 (2024)
- Vol. 12 (2023)
- Vol. 11 (2022)
- Vol. 10 (2021)
- Vol. 9 (2020)
- Vol. 8 (2019)
- Vol. 7 (2018)
- Vol. 6 (2017)
- Vol. 5 (2016)
- Vol. 4 (2015)
- Vol. 3 (2014)
- Vol. 2 (2013)
- Vol. 1 (2012)
Highly Accessed Articles
Latest books, e-mail alert.

Further Information
Mdpi initiatives, follow mdpi.
Subscribe to receive issue release notifications and newsletters from MDPI journals
Advances and perspectives in collaborative robotics: a review of key technologies and emerging trends
- Open access
- Published: 29 August 2023
- Volume 2 , article number 13 , ( 2023 )
Cite this article
You have full access to this open access article

- Swapnil Patil 1 ,
- V. Vasu 1 &
- K. V. S. Srinadh 1
6221 Accesses
3 Citations
Explore all metrics
This review paper provides a literature survey of collaborative robots, or cobots, and their use in various industries. Cobots have gained popularity due to their ability to work with humans in a safe manner. The paper covers different aspects of cobots, including their design, control strategies, safety features, and human–robot interaction. The paper starts with a brief history and evolution of cobots, followed by a review of different control strategies and Safety features such as collision detection and avoidance, and safety-rated sensors are also examined. Further to this, a systematic review of Ergonomics is also taken into account. Additionally, the paper explores the challenges and opportunities presented by cobot’s technology, including the need for standards and regulations, the impact on employment, and the potential benefits to industry. The latest research in human–robot interaction is also discussed. Finally, the paper highlights current limitations of cobot’s technology and the need for further research to address technical and ethical challenges. This synthesis document is an invaluable resource for both academics and professionals interested while developing and application of cobot’s technology.
Similar content being viewed by others

Collaborative Robots in the Critical Infrastructure Area Review

Collaborative Robotics: A Survey From Literature and Practitioners Perspectives

Intelligent and Collaborative Robots
Explore related subjects.
- Artificial Intelligence
Avoid common mistakes on your manuscript.
1 Introduction
Collaborative robots, commonly known as cobots, are transforming the way humans and robots collaborate in shared workspaces. The need for enhanced productivity and efficiency in industries, including manufacturing, logistics, and healthcare, has fuelled the development of cobots. Cobots are distinct from conventional industrial robots as they are intended to operate securely and efficiently in conjunction with human workers, providing greater flexibility and adaptability in the workplace.
One of the key challenges in developing collaborative robots is creating systems that can effectively perceive and respond to their environment. To address this challenge, researchers are exploring the utilization of computer vision and sensory modalities to boost the abilities of cobots in collaborative workspaces. Computer vision allows cobots to perceive their environment through visual data, while sensory modalities such as force-torque sensors and lidars provide additional feedback on the cobots’ movements and interactions with their environment.
To gain a better context and appreciate the importance of collaborative robots, it is crucial to comprehend industrial robots. Industrial robots are programmable and autonomous machines comprising electronic, electrical, and mechanical components, capable of executing a complex set of operations. These robots are massive, inflexible, and are usually installed to perform dangerous and physically demanding tasks that may be hazardous for human, such as transporting heavy loads in factories. Generally, industrials robots are designed for specific applications, kept separate from human workers, and occupy a distinct workspace. In contrast, collaborative robots, also known as co-bots, are intended to operate alongside human workers in the same workspace. These robots weigh a lot less compared to traditional industrial robots, enabling greater mobility and ease of movement within the factory or workspace or industry that they are installed in. One of the advantages that cobots offer over industrial robots is their flexibility, as they can be used to perform multiple tasks, making them highly adaptable to changing work requirements.
This review's objective is to give sufficient information on the state of the art for HRI in artificial cobotic fields. A collaborative system is created to conduct business with a living being within a predetermined collaborative workspace where mechanical hazards are most likely to arise. This is because when humans and robots share a workplace, it is feasible for implicit, non-functional (and undesirable) linkages to form. While collaborative robots offer several crucial safety precautions that permit the execution of safe operations, this status typically changes as they are incorporated into a working environment and outfitted with various end-effectors kinds. Because of this, it's important to properly enforce safety rules regarding the design of the work cell as well as devices for preventing collisions and/or contact mitigation.
The psychophysical and social well-being of drivers is a part of ergonomics, often known as human factors. Physically speaking, collaborative robots can lighten the pressure on drivers by helping them with laborious and repetitive duties. As opposed to that, a close partnership can stress out drivers' brains. In fact, the unidentified robot movements may hurt drivers' abilities and performances.
Because of this, cognitive ergonomics in collaborative robots is a genuinely new and sometimes overlooked concept. Drivers may experience mental stress due to teamwork. In fact, the unidentified robot movements may hurt drivers' abilities and performances. Because of this, cognitive ergonomics in collaborative robots is a genuinely new and sometimes overlooked concept. So as to move collaborative robotics from the laboratory to the workshop or manufacturing facility of the industry, the purpose of this study is to examine the state-of-the-art in collaborative robotics safety and ergonomics and to pinpoint those research areas that are very significant (Fig. 1 ).

Application of COBOTS
1.1 History of collaborative robots
The history of industrial revolutions sheds light on where collaborative robots stand in terms of industrial technological advancements. Industrial revolutions are defined as changes in technology used in manufacturing and production industries during a specific time period. The seventeenth century saw the beginning of the industrial revolution, saw the introduction of water and steam power to mechanize machines, which revolutionized manufacturing and allowed for mass production and assembly lines. The second industrial revolution, in the late eighteenth century added electricity to the equation and replaced steam engines with electrical ones. The third industrial revolution, in the late nineteenth century, saw the introduction of computers and automated machines, leading to further automation and increased manufacturing and assembly line capacities with increased productivity.
Industry 4.0, the latest and most advanced concept of industrial revolution, was coined in Germany in 2011. Industry 4.0 uses digitization and networked production, incorporating IoT, cyber-physical systems, and cloud computing to create “Smart Factories.” Although the concept of collaborative robots predates Industry 4.0, they have become increasingly relevant to the production and manufacturing industry with the advent of this latest revolution. In shared workspaces, collaborative robots are made to function effectively and safely next to human workers. They are programmed to perform a range of tasks, such as assembly, welding, packaging, and inspection, among others. Cobots have a range of sensors on board and technologies that allow them to detect and avoid collisions with human workers and adjust their movements based on human input (Figs. 2 , 3 ).

History of COBOTS

Market of COBOT
1.2 Difference between robots and cobots
See Table 1
1.3 Types of cobots
Independent
Robots that can work independently and collaboratively with humans are created for different manufacturing processes and on different job items. So as to make sure that the cobots can operate securely and effectively without the need for cages or fences, this sort of collaboration often uses sensors and other safety elements. Robots that can work independently and collaboratively with humans are created for different manufacturing processes and on different job items.
So as to make sure that the cobots can operate securely and effectively without the need for cages or fences, this sort of collaboration often uses sensors and other safety elements.
Simultaneous
A human operator and a collaborative robot (cobot) work simultaneously on different production processes at the same work piece in simultaneous collaborative robots. There is no task or time dependency in this kind of collaboration between humans and cobots. Concurrently working on the same piece of work reduces transit time and boosts productivity and space efficiency.
By allowing cobot to carry out potentially hazardous duties for a human operator, simultaneous collaboration can also increase safety in dangerous circumstances.
Sequential collaborative robots are used to undertake successive production procedures on the same work item with a human operator. The operator’s operations and those of the cobots are time-dependent, with the cobot being tasked with handling more time-consuming or repetitive activities, which may also improve the operator's working conditions.
This kind of cooperation is beneficial for boosting output, cutting down on errors, and cutting down on idle time in between activities. Working together sequentially is frequently employed in processes like assembly, welding, and material handling.
Supportive collaborative robots are a subset of collaborative robots that allow an operator and cobots to collaborate while working on the same task or piece of work. As one cannot complete the task without the other, there may be complete dependencies between the human and the cobots in this type of situation. Together, the cobot and human operator strive to accomplish a single objective, each balancing the other's advantages and disadvantages.
Some common applications of supportive collaborative robots include assembly tasks, pick-and-place operations, and quality control inspection.
2 Literature survey
This section offers a survey of latest studies on interactions between human and robots in commercial collaboration robotics. Additionally, it suggests dividing the information in these works’ content into two groups: Safety and Ergonomics. The Safety category includes works focused on developing safe human–robot interaction systems and ensuring the safety of human workers in shared workspaces. The Ergonomics category includes works focused on improving the ergonomic design of collaborative robots to enhance the comfort and efficiency of human workers. Furthermore, this chapter addresses the challenges associated with industrial Cobots and identifies potential areas for future research.
One major challenge is the development of effective communication systems that enable seamless cooperation between machines and people. Additionally, there is a need for the development of advanced sensing technologies that enable robots to perceive and respond to their environment in real-time.
In conclusion, this chapter highlights the emergence of collaborative robots and the need for new human–robot interaction systems to fully utilize their capabilities. It also provides a classification of recent works in the field and addresses challenges and future research directions.
Materials and methods
There are several papers and journals and hence to take the most relevant into account review should be carried out using systematic, scientific, and transparent and in reliable method.
To carry out scientific review on Collaborative Robotics we followed following steps for study:
Step 1: defining the study's or reviews scientific objectives;
Step 2: defining the explorations amorphous borders;
Step 3: setting the conditions for data collection;
Step 4: validation of result and classification.
Defining the study’s or reviews scientific objectives
The following research questions allowed us to determine the study's goals:
RQ1. What are the main research themes or areas of research in collaborative robots?
RQ2. Classification of research themes and identifying the most prominent out of Safety and Ergonomics.
RQ3. What are the research gaps and research challenges?
In the most recent scientific literature, researchers have mostly focused on safety and ergonomics (or human aspects) for cobots intended for industrial usage. This review study will assist us in understanding and examining the most recent research issues and areas in safe and comfortable collaborative robotics. To use collaborative and participatory workplaces successfully in assiduity, we specifically want to comprehend how the exploratory results obtained in recent times can be dispersed and where we need to focus in the future.
Defining the exploration's amorphous borders
When reviewing literature on cobots, it is important to establish conceptual boundaries to ensure that the review is focused and relevant to the research question or topic at hand. Some possible conceptual boundaries to consider include:
Type of collaboration: collaborative robots can interact with humans in a variety of ways viz Supportive, Sequential, Simultaneous or Independent. Researchers may choose to focus on a particular type of collaboration to better understand the specific issues related to that type of interaction.
Safety and ergonomics: safety and ergonomics are critical considerations in the design and implementation of collaborative robots. Researchers may choose to focus specifically on these aspects of collaborative robot research understand the latest state of the art and identify areas for improvement.
Technical approaches: collaborative robot research can involve a range of technical approaches, including control algorithms, sensing technologies, and human–robot interface design. By focusing on a specific technical approach, researchers can gain a deeper understanding of the strengths and limitations of that approach and identify areas for future research and development.
Human factors: collaborative robots are designed to work alongside humans, and as such, understanding human factors is essential to their successful implementation. Researchers may choose to focus specifically on human factors research related to collaborative robots, such as user acceptance and trust workload and cognitive demands, and the impact of robot behavior on human performance.
These are just a few possible conceptual boundaries to consider when reviewing literature on collaborative robots.
Setting the conditions for data collection
We linked pertinent documents for our investigation in several ways.
As a preliminary step, we used the following search phrases for the title, abstract, and keywords to link the literature in the collaborative robotics field: Cobots, collaborative robots, human-robots, collaborative robotics, etc. All types of topics and documents were included in this initial step.
The terms “industry,” “artificial,” “manufacturing,” “assembly,” and “product” were included to the hunt terms in this alternative stage because we focused on collaborative robotics in the artificial sector as robotic results.
The following stage was to concentrate our investigation on pertinent engineering or computer science exploration studies.
The search was limited to using the journal as a source in order to solely examine high caliber content. To concentrate the research on problems related to the design of collaborative workplaces, we further limited the search to the topic categories “Engineering” and “Computer Science.”
In the fourth step, we split the results of the hunt into two groups, one for a workshop discussing safety and the other group discussing ergonomics. As a result, we divided the data into two groups, one using the phrase “safety” and the other using “ergonomics” or “human factors”.
Validation of result and classification
As per research questions, our prime objective are to segregate the state of the art literature of collaborative robotics into different clusters and sub clusters and identifying the most prominent cluster.
In this stage, initially thorough reading of abstracts of each literature is conducted to identify the relevance of literature to our study. In consequent steps, proof reading to journals and papers were done and certain literature were eliminated which were not relevant to the objectives of study.
In next section, Discussion of the content of the scientific literature on collaborative robots is elaborated which broadly classified into two groups viz. Safety and Ergonomics. Further each group is classified into two sub clusters (Fig. 4 ).

Identification of groups and subgroups
“It’s impossible for a robot to hurt a human being” and “A robot cannot, through its inaction, enable a human being to endanger himself” are the first and third laws of robotics, respectively. This emphasizes how crucial safety is with the evolution of industrial cobots, robots are now capable of working alongside humans and performing tasks in close proximity. However, doing so necessitates disregarding security protocols and eliminating human–robot physical separation. The fast movement and use of dangerous tools by robots can pose a threat to humans. Moreover, in extreme environmental conditions or in case of system failure, the dangerous behavior of these systems can lead to catastrophic consequences.
Authored by De Santis and Siciliano’s the paper provides a comprehensive review of safety issues related to human–robot cooperation in manufacturing systems. The authors identify four main categories of safety issues: physical safety, functional safety, social safety, and psycho safety. One of the key contributions of the paper is its emphasis on the need for a comprehensive, multidisciplinary approach to addressing safety issues in human–robot collaboration [ 1 ].
Bicchi et al. discuss the safety issues related to the increasing trend of physical interaction between humans and robots. Author proposes the concept of “safe robot behavior” which is based on the robot's ability to sense the environment, monitor its own actions, and adjust them to ensure safety. The authors further discuss the various factors that influence the safety of physical human–robot interaction, such as the level of interaction, the type of task, the environment, and the human operator's experience and skills. The chapter concludes by presenting various approaches and technologies that can be used to enhance the safety of physical human–robot interaction, such as compliance control, force feedback, and proximity sensors. The authors underline the importance of further research and development in this field to ensure safe and effective human–robot collaboration [ 2 ].
Wang et al. provided a brief review of safety strategies for physical human–robot interaction (PHRI). They highlighted the importance of developing safety measures to ensure that PHRI can be integrated safely into various applications, including manufacturing, healthcare, and home assistance. The authors identified various types of safety strategies, including mechanical, electrical, and software-based measures. They also discussed the importance of integrating sensing and monitoring systems into PHRI applications to detect and react to any potential collisions or hazards [ 3 ].
The International Organization for Standardization (ISO) published a technical study called ISO 10218-2:2011 that details the safety standards for industrial robots and robotic devices, specifically the robot systems and integration. This standard offers instructions for designing, installing, running, and maintaining robotic systems, together with the necessary safety precautions for human–robot interaction (HRI). The report includes provisions for both functional and environmental safety, including protection against electric shock, fire, and explosion, and requirements for emergency stop functions, protective barriers, and safety interlocks. The standard also provides guidelines for risk assessment and reduction, as well as for the design and verification of safety-related control systems [ 4 ].
The paper by Gualtieri et al. discusses how to create collaborative assembly workstations that are both safe and ergonomic while also meeting the demands of production efficiency; system integrator designers need new design criteria. In this article, design rules and prerequisites are collected and categorised based on international standards, research, and actual use cases. This effort will aid in the future creation of a simple technique for the assessment of both new design concepts and applications based on the fulfilment of several criteria listed in a tick list. From the perspective of occupational health and safety, this check list will also give a preliminary assessment of how well certain of the required Machinery Directive standards have been met [ 5 ].
Further, safety of cobotics system in divided into two broad categories.
2.1.1 Contact avoidance
The idea of Contact Avoidance focuses on preemptively addressing the mechanical risks to operators by implementing preventive methods and systems to avoid hazardous contact. The ultimate goal is to prioritize the safety of the operators in industrial settings where they are working alongside machinery and equipment.
Schmidt and Wang et al. proposed a novel approach for active collision avoidance in human–robot collaboration scenarios. Their work focused on the development of a collision detection and avoidance system that uses force feedback to adjust the robot's trajectory in real-time. The proposed system consisted of three main components: a force sensor, a control unit, and a collision avoidance algorithm [ 6 ].
Chablat and Girin et al. developed an industrial security system that ensures safe and secure human–robot coexistence in manufacturing environments. The authors proposed an industrial security system that combines a range of sensing technologies, including cameras, laser scanners, and pressure sensors. The system is designed to detect the presence of humans in the robot's workspace and respond accordingly [ 7 ].
Bedolla and Belingardi et al. addressed the challenge of developing safe and efficient human–robot collaboration (HRC) assembly process in the automotive industry. The authors proposed a safety design framework that consists of three main phases: risk assessment, safety design, and safety verification. The risk assessment phase involves identifying and evaluating the risks associated with the HRC assembly process, such as collisions or entrapment. The safety design phase involves developing safety measures and controls to mitigate the identified risks, such as force-limited operation or proximity sensors. The safety verification phase involves testing and validating the effectiveness of the safety measures and controls [ 8 ].
Authored by Chen et al. the paper presents an approach to object recognition within the context of human–robot shared workspace collaboration. They propose a new approach based on deep learning algorithms, which can automatically learn and recognize objects in real-time [ 9 ].
The paper by De Luca and Flacco et al. discusses an integrated control approach for PHRI. The authors emphasize the need for effective collision avoidance, detection, reaction, and collaboration in order to ensure safety during human–robot interaction. The proposed control approach is based on a combination of active and passive compliance control. The authors also describe the use of vision and force feedback sensors to improve situational awareness and to enable the robot to adapt its behavior in real-time based on the human’s actions [ 10 ].
Fiacco et al. presented a depth space approach for evaluating the distance to objects in a human–robot collaborative workspace. The “Depth space,” is a metric space that represents the distances between the robot and objects in the workspace. They proposed a method for computing depth space using RGB-D data and a mathematical formulation that allows the robot to assess the distance to objects in real-time. The study contributes to the literature on human–robot collaboration by proposing a new approach for evaluating distance to objects in the workspace, which can aid in collision avoidance and ensure the safety of humans and robots working together [ 11 ].
Authored by Navarro et al. paper presents a novel approach for achieving safe human–robot interaction based on adaptive damping control. The authors propose an ISO10218-compliant controller for robotic manipulators, which is capable of reducing the damping coefficient during the interaction with a human operator to minimize the risk of injury in the event of a collision. The controller estimates the external force applied by the human operator and adapts the robot's damping coefficient accordingly to limit the collision force. The authors evaluate the performance of the proposed controller using a KUKA robot arm and a force/torque sensor [ 12 ].
Authored by Morato et al. proposed a framework for safe human–robot collaboration using multiple kinects for real-time human tracking. The proposed framework integrated the RGB and depth information of multiple Kinects to create a 3D model of the workspace and the humans present in it. The 3D model was then used to track the human movements in real-time, and the robot was programmed to respond accordingly. The study suggests that the use of multiple kinects for real-time human tracking can significantly improve the safety of human–robot collaboration. However, the study did not address the limitations of the kinect technology, such as occlusions, accuracy issues, and noise in the depth data, which could affect the reliability of the proposed framework in practical settings [ 13 ].
Authored by Avanzini et al. proposed a novel approach for safety control of industrial robots using a distributed distance sensor. The proposed solution involved the use of a network of sensors that can detect the proximity of any obstacle or person within the robot workspace. The system was designed to operate in real-time and provide continuous feedback to the robot controller, allowing it to adapt its movements and speed to avoid any potential collision. The results showed that the distributed distance sensor was able to detect obstacles accurately and provide timely feedback to the robot controller, allowing it to modify its movements and avoid collisions [ 14 ].
Authored by Bdiwi et al. presents a strategy for ensuring the safety of human–robot interaction in industrial settings. The proposed strategy involves dividing the interaction between the human and the robot into three levels: low, medium, and high. For each level, the authors propose specific safety measures that should be implemented to ensure the safety of humans during the interaction. These measures include limiting the speed and force of the robot, using proximity sensors to detect the presence of humans, and implementing emergency stop systems [ 15 ].
2.1.2 Contact detection and mitigation
The idea of Contact Detection and Mitigation is focused on ensuring the safety of operators in terms of mechanical risk by reducing the energy exchanged during unexpected or accidental contact between humans and robots. This is accomplished through the implementation of systems and methodologies aimed at detecting and mitigating such collisions.
Authored by Heo and Lee et al. the paper proposes a deep learning-based approach to collision detection for industrial collaborative robots. The authors propose a deep learning-based approach that uses convolutional neural networks (CNNs) to predict collisions between the robot and its environment. They train the CNN on a dataset of simulated collision scenarios, and demonstrate that the model can accurately predict collisions in real-time with low computational overhead [ 16 ].
Authored by Wang et al. the paper presents an overview of the state-of-the-art technologies and approaches for implementing physical human–robot interaction (pHRI) such as force sensing, tactile sensing, and vision-based sensing in collaborative manufacturing systems. To evaluate the effectiveness of pHRI in manufacturing, the authors conducted a case study involving a collaborative assembly task. The study involved the use of a force-sensing and camera-sensing robot to work alongside human workers in the assembly of a product [ 17 ].
Authored by Liu et al. the paper presents a collision detection and identification method for robot manipulators based on an extended state observer (ESO). The authors propose a collision detection and identification method based on an ESO. The ESO is used to estimate the state of the robot manipulator, including the position, velocity, and acceleration. By comparing the estimated state with the expected state, the method is able to detect and identify collisions [ 18 ].
The paper by Schiavi et al. discusses the integration of active and passive compliance control for ensuring safe human–robot coexistence. The authors argue that active compliance control can ensure safety during interactions with high forces or impacts, while passive compliance control can provide stability and safety during interactions with low forces or impacts and presents a hybrid controller that combines both active and passive compliance control and allows for safe interaction with a human operator [ 19 ].
Authored by De Luca et al. the paper focuses on the development of a lightweight manipulator arm equipped with sensors to detect potential collisions and to react appropriately to prevent damage to the robot and injury to humans. The paper describes the collision detection system which is based on a combination of force and torque sensors, and visual information from cameras mounted on the robot. The authors also propose a safe reaction algorithm to avoid or minimize the impact of collisions [ 20 ].
Authored by Haddadin et al. the paper provides an in-depth review of the collision detection and reaction approaches for ensuring safe physical human–robot interaction. The authors present a novel approach for collision detection and reaction using three-layer safety architecture. The first layer is the control layer, which monitors the robot's motion and signals an alarm in the event of a collision. The second layer is the decision layer, which evaluates the severity of the collision and triggers the appropriate safety measure. The third layer is the reaction layer, which executes the safety measure and stops the robot in case of an emergency [ 21 ].
Authored by De Benedictis et al. proposed a control strategy for regulating force impulses during human–robot interactions. The authors proposed a control strategy based on impedance control, which uses a combination of force and position control to regulate the force impulse during an impact. The proposed method was implemented and tested using a robotic manipulator and a force sensor. The results showed that the proposed strategy effectively regulated the force impulse during impact, leading to improved safety during human–robot interactions [ 22 ].
The paper by Indri et al. presents a collision detection method between an industrial robot and its environment. The approach consists of three main steps: first, the environment is modeled using a mesh structure; second, the robot is represented as a set of convex polyhedral; and finally, collision detection is performed using an efficient algorithm that takes into account the relative motion between the robot and the environment. Experimental results demonstrate that the effectiveness of the proposed approach and on comparison approach found to be more efficient [ 23 ].
Authored by Lee and Song et al. the paper proposed a novel method for detecting collisions between a robot manipulator and its surroundings without the need for sensors. The proposed method utilizes a friction model to estimate the contact force between the robot manipulator and the environment. This force is then used to detect collisions based on a threshold value set by the user. The authors tested the method on a three-axis robot arm and showed that it was able to successfully detect collisions with high accuracy and without the need for additional sensors [ 24 ].
Authored by Ren and Dong et al. presented a new approach for collision detection and identification of robot manipulators based on an extended state observer (ESO). The proposed method used the ESO to estimate the external disturbance caused by the collision and identified the collision parameters, including the collision position, direction, and magnitude. The main contribution of this work is the use of an ESO for collision detection and identification of robot manipulators [ 25 ].
2.2 Ergonomics
Ergonomics is the study of designing work environments and systems that are optimized for human use. Collaborative robots are designed to work safely and effectively with human workers in a shared workspace. Therefore, ergonomics is essential in the design and implementation of collaborative robots for several reasons such as Safety, Efficiency, Comfort, Productivity and Adaptability. Overall, the importance of ergonomics in collaborative robots cannot be overstated and leads to better outcomes for both human and robot workers.
Bortot’s et al. focuses on the ergonomic aspects of human–robot coexistence in the context of production. The thesis identifies several key ergonomic factors that are important for ensuring safe and effective human–robot collaboration in production settings. These include physical factors such as the design and placement of robotic systems, as well as cognitive and social factors such as the level of automation and the quality of communication between humans and robots [ 26 ].
Authored by Fraboni et al. focus of this article is on establishing secure and productive human–robot collaborations, which help us, understand how to implement and evaluate collaborative robotic systems in organizations. This means that the interaction between people and cobots should be planned and carried out in a way that minimizes hazards to employees while still increasing system performance and productivity. In general, successful human–robot collaboration entails finding a balance between protecting workers’ physical and mental health and reaching the appropriate levels of productivity and performance. The study emphasizes crucial tactics for assuring employees' psychological well-being, maximizing performance, and fostering the seamless integration of new technology. This has broad implications for sustainability in organizations [ 27 ].
2.2.1 Physical ergonomics
Physical Ergonomics in the field of human–robot interaction in industrial settings involves reducing biomechanical workload through the use of collaborative robots as advanced tools, aimed at improving the physical well-being of the operators.
Authored by Sadrfaridpour and Wang et al. proposes an integrated framework for HRI in collaborative assembly tasks within Hybrid manufacturing cells which consists of three key components: task planning, motion planning, and control. The task planning involves determining the optimal sequence of tasks for the human and robot, taking into account factors such as task complexity and worker/robot capabilities. The motion planning involves generating trajectories for the robot and human worker to perform their respective tasks, while ensuring that collisions are avoided and the task is completed efficiently. The control involves implementing feedback control to ensure that the robot and human worker perform their tasks accurately and effectively [ 28 ].
Authored by Cherubini et al. the paper presents a framework for collaborative manufacturing pHRI which consists of three main components: task planning, pHRI control, and safety monitoring. The task planning involves determining the optimal sequence of tasks for the human worker and robot to perform, taking into account factors such as task complexity and worker/robot capabilities. The pHRI control involves implementing feedback control to ensure that the robot and human worker perform their tasks accurately and effectively, while ensuring that the human worker is not at risk of injury. The safety monitoring involves continuously monitoring the environment and behavior of the human worker and robot to ensure that any potential safety risks are identified and mitigated [ 29 ].
Authored by Dannapfel et al. the paper presents a systematic planning approach for enabling heavy-duty human–robot cooperation in the automotive flow assembly process which consists of five main steps: (1) process analysis and classification, (2) task allocation, (3) workspace design, (4) robot selection, and (5) safety analysis [ 30 ].
The Robonaut is a humanoid robot designed for working in space environments with astronauts. Bluethmann et al. present the development of Robonaut and its potential applications in space missions. The robot’s design includes human-like arms, hands, and fingers that can mimic human movements and perform complex tasks. The robot is also equipped with sensors, cameras, and computer vision systems that allow it to interact with its environment and perform various tasks. The paper discusses the design challenges associated with creating a humanoid robot for space missions, including the need to ensure safety, reliability, and compatibility with the existing space infrastructure [ 31 ].
Authored by Müller et al. investigates how collaborative robots (cobots) can be integrated into assembly lines and how they can work together with human workers to increase efficiency and productivity. The authors analyzed the assembly tasks and identified those that could be performed by robots and those that required human involvement. The study proposed a process-oriented task assignment algorithm to determine what tasks are expected to the robot and what tasks are expected by the human worker. The algorithm takes into account the complexity of the task, the skill level of the worker, and the robot's capabilities [ 32 ].
Maurice et al. present a literature review on human-oriented design for collaborative robots. They begin by defining the characteristics of cobots and highlighting the challenges involved in designing them. They then discuss the various design considerations that must be taken into account when creating cobots that are safe and easy to use. These include the robot's size, weight, speed, and mobility, as well as its sensing and control capabilities. The authors then discuss several case studies that illustrate how human-oriented design can be applied in practice. They also discuss the use of motion capture technology to develop cobots that can mimic human movements and collaborate with workers in real-time [ 33 ].
Authored by Heydaryan et al. the article discusses implementation of a HRC system in an automotive assembly line. The authors present the safety measures adopted for the system design and development to ensure the protection of the human operator during the collaboration process. It then introduces the case study of a real-world HRC assembly process in the automotive industry, and the safety design strategies and tools applied during the development of the system [ 8 ].
The paper by Tang and Webb et al. paper presents a gesture control system that allows operators to control robots without physically touching any interface. The authors suggest that this system may improve ergonomics and reduce the risk of repetitive strain injuries. The authors describe the design of their system, which is based on a combination of depth cameras and machine learning algorithms. The system uses the cameras to capture and interpret the operator's gestures in real time, and then uses this information to control the robot’s movements [ 34 ].
Authored by Faber et al. article presents a method for generating assembly plans that take into account the cognitive capabilities of human workers and the physical capabilities of robotic collaborators. The authors propose a planning framework that incorporates information about the tasks to be performed, the characteristics of the human workers, and the capabilities of the robots, with the aim of creating assembly sequences that are both ergonomic and efficient [ 35 ].
2.2.2 Cognitive ergonomics
Cognitive ergonomics pertains to minimizing mental stress and psychological discomfort for operators while working alongside robots. This principle is essential in ensuring interaction acceptability. Additionally, physical ergonomics focuses on reducing biomechanical workload and improving operators' physical well-being by utilizing collaborative robots as advanced tools. Organizational ergonomics, on the other hand, aims to optimize social-technical systems in terms of organizational structures, policies, and processes. By improving these factors, organizations can facilitate safe and efficient collaboration between human workers and robots.
Authored by Long et al. the paper presents an industrial security system designed to ensure safe human–robot coexistence in an industrial environment. The authors propose an industrial security system that includes three main components: a secure communication protocol, a secure operating system, and a secure monitoring system. The secure communication protocol is designed to prevent unauthorized access to the robot system by using encryption and authentication mechanisms. The secure operating system is designed to prevent malware and other attacks on the robot by enforcing strict security policies and isolating the robot's software environment from other systems. The secure monitoring system is designed to detect and respond to security breaches in real-time by analyzing system logs and monitoring the behavior of the robot and human operators [ 7 ].
Authored by Faber et al. the paper presents an approach to enhance human–robot collaboration in self-optimizing assembly cells by incorporating cognition into assembly sequence planning. The author proposes a cognition-enhanced assembly sequence planning approach that incorporates cognitive models of human behavior into the planning process. The approach uses a cognitive architecture called ACT-R (Adaptive Control of Thought-Rational) to model human behavior and simulate the performance of assembly tasks in collaboration with robots [ 35 ].
Solvang and Sziebig’s et al. paper presents a review of the literature on the use of industrial robots in cognitive info-communication. The paper explores the potential for robots to function as cognitive systems that can interact with humans in complex manufacturing environments. The author explains the concept of cognitive info-communication, which refers to the exchange of information and knowledge between humans and machines. They argue that cognitive info-communication is critical for effective human–robot collaboration in manufacturing, as it enables robots to understand and respond to human intentions and goals [ 36 ].
Authored by Shravani and Rao et al. discusses the challenges faced by industries while introducing robots and automation without creating fear of unemployment and high costs. The review included studies on the social and psychological impact of automation on the workforce and the economy. The framework also emphasizes the need for creating a supportive work environment that encourages human–robot collaboration and facilitates the transition to a more automated workplace [ 37 ].
Authored by De Santis’ et al. the paper presents literature review focuses on the modeling and control of physical and cognitive aspects in human–robot interaction (HRI). The paper explores the current state of HRI research and the challenges faced in modeling and controlling robot behavior in physical and cognitive aspects to improve human–robot collaboration. The author discusses the need for robots to have cognitive capabilities to facilitate communication and collaboration with humans in different environments. The review emphasizes the importance of designing robots that can adapt to different tasks and environments while ensuring the safety and comfort of humans [ 38 ].
Authored by Medina, Lorenz, and Hirche et al. the paper proposes a new approach to human–robot collaboration based on anticipatory haptic assistance. The paper presents a framework for human–robot collaboration that incorporates anticipatory haptic assistance, based on a stochastic model of human behavior. The authors then describe how this framework can be used to synthesize appropriate haptic cues that help guide the human operator towards a desired task outcome [ 39 ].
Authored by Matsas et al. presents a prototyping approach for proactive and adaptive techniques for human–robot collaboration in manufacturing using virtual reality. The authors propose a methodology for designing and evaluating human–robot collaborative tasks that integrates the use of virtual reality simulations and machine learning techniques. The paper focuses on the development of a proactive and adaptive approach to haptic feedback for collaborative tasks, which takes into account the uncertainty in human behavior [ 40 ].
Authored by Maurtua et al. discusses the key issues and challenges of human–robot collaboration in industrial settings, with a focus on safety, interaction, and trust. The authors provide an overview of various safety measures that can be taken to ensure safe HRC, including safety sensors and safety controllers. They also discuss the importance of communication between humans and robots, highlighting the need for robots to be able to understand human intentions and for humans to trust the robot's actions [ 41 ].
Authored by Charalambous et al. aimed to identify the key organizational human factors that influence the introduction of human–robot collaboration (HRC) in industry. The study involved semi-structured interviews with industry experts who had experience in HRC implementation… These factors included organizational culture, management support, employee involvement and training, job design, and communication. The authors noted that these factors were interrelated and had an impact on each other [ 42 ].
Authored by Rahman and Wang et al. proposes a framework for subtask allocation in human–robot collaboration based on mutual trust. The proposed framework is composed of three primary modules: the communication, the trust evaluation, and the subtask allocation. The authors validate their framework through simulation and experiments on a lightweight assembly task. The findings indicate that the proposed framework leads to enhanced collaboration performance and increased mutual trust between the human and robot [ 43 ].
Authored by Koppenborg et al. investigation into how human–robot collaboration in an industrial setting is impacted by movement speed and predictability. The author conducted a study with 32 participants who were instructed to put something together collaboratively with a robot. The authors concluded that movement speed and predictability are important factors to consider when designing human–robot collaboration systems in industrial settings, and that slower and more predictable robot movement can improve performance and perceived safety and trust [ 44 ].
3 Discussion
In this section, we will begin by presenting and analyzing the descriptive findings of our study. We will then proceed to examine the results derived from the content analysis, aiming to identify the most prominent research themes that have emerged within the field of safety and ergonomics in industrial collaborative robotics. Lastly, we will acknowledge and discuss the limitations associated with this study.
In total, 45 papers were analyzed in detail, with the following breakdown for each cluster, the total number of publications classified (including papers classified in additional clusters):
For Contact Avoidance 10 papers, 10 papers for Contact Mitigation and, 4 papers covering both contact avoidance and detection and mitigation of contacts.
One paper for Physical and Cognitive and Organizational Ergonomics, nine papers for Physical Ergonomics and, 11 papers for Cognitive and Organizational Ergonomics.
According to Fig. 5 , 53.33% of the publications found are about "safety," while 46.66% are about "ergonomics." This indicates that contemporary researchers made investments in. More work should be put into developing safety measures rather than researching HRI ergonomics situations.

Number of papers
3.1 Challenges and future development
In this segment, Based on the most important and intriguing research themes found in each cluster, we highlight the limitations of our analysis and suggest options for future research.
3.1.1 Safety
Regarding safety in Human–Robot commerce (HRI), the primary ideal is to guard drivers from unlooked-for collisions between mortal body corridor and robot systems or workspace rudiments, while contemporaneously icing optimal performance of product systems.
Contact Avoidance crucial exploration themes that hold significance and pledge for Contact Avoidance includes Motion Planning and Control, Sensor Systems for Object Tracking, and Safety Management. These findings affirm the prevailing trend of developing safety systems that prioritize driver protection through preventative ways. Accordingly, a coordinated integration of vision systems, robot control, and line planning methodologies becomes pivotal. Safety Management also assumes significance as it supports the operation and evaluation of proposed safety measures, enabling better collision vaticination and minimizing the liability of similar incidents.
Contact Discovery and Mitigation Notable exploration themes for Contact Discovery and Mitigation comprise Motion Planning and Control, Robot System Design, and detector systems for contact operation. These themes parade essential correlations as advancements in protection- grounded safety measures bear concurrent development in robot tackle, contact discovery detector systems, and line planning. Similar combined sweats grease effective collision operation and reduce associated consequences.
3.1.2 Ergonomics
The part of ergonomics in HRI involves aiding humans in reducing biomechanical and cognitive load associated with work, without introducing new health and safety hazards stemming from relations with robot systems.
Fitness Ergonomics Task Scheduling (of high significance) and Motion Planning and Control (of moderate significance) are two important investigation subjects for physical ergonomics. These findings are consistent with the idea of human-centered workspaces supported by sophisticated robotization technologies. The creation of adaptive real-time task scheduling, as well as motion planning and control, should be given priority by unborn exploration. By adapting work cycles and robot system performance based on drivers' physical conditions (e.g. anthropometric features, age, gender, dominant branch, special limits or disabilities, weariness, etc.), these developments would facilitate workload reduction. Such a strategy aids in the implementation of sustainable product systems, improves the welfare of drivers, and makes it possible to hire older or otherwise disadvantaged workers. Still, it calls for the gathering of specific real-time data relating to drivers' psychophysical states.
Metrics and Tests, Motion Planning and Control, and Simulation and Modeling are some of the main research areas in cognitive ergonomics. Cognitive aspects should concentrate on minimizing work- related psychosocial pitfalls arising from participated conditioning and workspaces. Also, icing the adequacy of robot systems by mortal associates is pivotal. Balancing the advantages and implicit discomfort associated with varying degrees of commerce becomes essential. Methodologies for assessing and testing cooperative systems could prop in relating and mollifying implicit sources of psychosocial pitfalls. Also, the design of crucial features and performance related to cooperative systems should consider these aspects. Simulations and modeling play a vital part in supporting and validating these design choices.
3.1.3 Other challenges
A cobot must be built similarly to a traditional robot in order to maximize task execution quality, the ergonomics of a human coworker, and ensure his safety.
Millions of artificial robots have been used in production environments across the globe. Therefore, it would be more desirable to develop technologies that can transform them into mortal-safe robotic systems with no attack variations rather than replacing all of these traditional robots with safe cobots at a huge expense. Reprogram capability, scalability and literacy capability of cooperative robots is also a big challenge. On the same line, erecting a stoner-friendly mortal—robot interfaces come up with a challenge.
Real- time constraints are a critical aspect of mortal- robot commerce (HRI) in the realm of artificial cobotics. Meeting these constraints is essential to insure the trust ability and effectiveness of the system. When calculations exceed predefined thresholds, it can affect in- deterministic geste and potentially lead to system failures with severe consequences. These limitations have significant counteraccusations for colorful aspects of HRI, including mortal action recognition, contemporaneous discovery of multiple conduct, anti-collision strategies, control armature, and 3D vision.
A significant challenge in the advancement of mortal- robot commerce (HRI) within artificial cobotic systems is the fault- forbearance paradigm. This paradigm aims to incorporate individual capabilities André-planning capacities, allowing the system to acclimatize stoutly grounded on the available coffers and trustability. Expansive exploration has been devoted to the fault forbearance model, but a comprehensive approach that seamlessly integrates this paradigm into the design of HRI and control infrastructures is still lacking.
There are colorful constraints and challenges associated with artificial cobotic systems that need to be addressed. These include achieving dependable discovery of mortal stir to enable the development of accurate prophetic systems, icing robust discovery of contact between robots and humans in multiple locales, and developing responsive regulators able of real- time liner-planning in complex and cluttered surroundings.
3.2 Summary of the discussion
According to the statistics, the most cutting-edge debate subjects for contact avoidance are Safety Management, Sensor Systems for Object Tracking, and Motion Planning and Control. Case studies, operations, help systems, and artificial intelligence all have minimal effects. The main themes of Motion Planning and Control include Mortal-stir Vaticinator, Line Modification, and Stir Control Techniques. The main topics covered in Sensor Systems for Object Tracking include the creation and fusion of monitoring and computer vision systems for gesture recognition, workplace management, and human localization. The design of methods, standards, and guidelines for connection obstruction operation is one of the main themes in safety management.
The statistics show that Motion Planning and Control, Robot System Design, and sensor systems for contact operation are the most cutting-edge dissertation issues for Contact Discovery and Mitigation. Case studies, operations, safety management, simulation and modeling provide only minor contributions. The primary topics for Motion Planning and Control are control strategies. The development of robot attack and design methods is the focus of Robot System Design. The development of sensor bias and methodology for discovery are the primary contents for sensor systems for contact operation.
Task Scheduling Strategy is the most sophisticated physical ergonomics discourse theme, according the data. Motion Planning and Control and Assistance Systems provide a small contribution. The main focus of Task Scheduling Strategy is on assigning and organizing robot-
Human task sequences while incorporating physical ergonomics.
Metrics and Tests, Motion Planning and Control, and Simulation and Modeling appear to be the most sophisticated discussion themes for Cognitive and Organizational Ergonomics. Task scheduling strategy and assistance systems provide insignificant contributions. The development of an evaluation technique for robot acceptability and the establishment of an organizational framework for effective HRI operations performance are the major topics covered in Metrics and Tests. The primary topics for Motion Planning and Control are control tactics connected to cognitive components of HRI. The creation of virtual reality exploitation for the assessment of the cognitive aspects of HRI is one of the key topics covered in Simulation and Modeling.
The current trend in artificial cobotics is concentrated on developing flexible systems that enable safe and cooperative relations between humans and robots to negotiate colorful tasks. This growing trend encourages diligence to consider integrating similar cobotic systems into their being manufactories. In the coming times, cobots are anticipated to play a pivotal part and become the dominant technology for named operations, potentially filling the maturity of the remaining 90 of workstations. It's worth noting that a significant number of exploration studies have been devoted to addressing safety and security enterprises in cobotic systems, exercising different technologies and approaches to insure the well- being of mortal workers and the overall system integrity.
Table shown below Tables 2 and 3 concisely represents the entire summary of review of safety and ergonomics consisting both sub clusters for each.
Summary of literature related to Safety cluster of Collaborative robots:
Summary of literature related to Ergonomics cluster of Collaborative robots:
4 Conclusion
Over the past few years, industrial collaborative robotics has attracted a great deal of attention, and human–robot interaction (HRI) has become a vital area of study. This study did a thorough analysis of the literature and developed a tentative classification system, classifying and sub classifying significant works and new research in this field. This study's main goal was to identify and evaluate the burgeoning topics and research problems in safety and ergonomics in industrial collaborative robotics.
For each selected article, a summary was provided, outlining the problem addressed, the proposed approach, the main outcomes obtained, and potential future directions for research. The study also acknowledged the existence of a significant gap between the research carried out in laboratory settings and the practical implementation of cobotic technology in real industrial environments, particularly in the context of smart factories.
The findings of the review indicated that safety was the most extensively explored research category, although ergonomics has witnessed notable growth in recent years. Interestingly, the majority of high-level themes identified were more closely related to safety aspects rather than ergonomics. Within the realm of safety, there was a greater emphasis on prevention rather than protection measures.
Several difficulties and problems encountered by researchers studying HRI in industrial cobots were noted and emphasized towards the end of the work. Considering the continuous growth of the industrial collaborative robot market, these innovations hold promise for the implementation of collaborative production systems that are safe, ergonomic, trustworthy, and efficient.
Data availability
Not applicable.
De Santis A, Siciliano B. Safety issues for human-robot cooperation in manufacturing systems. Tools and Perspectives in Virtual Manufacturing. VRT.
Bicchi A, Peshkin MA, Colgate JE. Safety for physical human–robot interaction. In: Siciliano B, Khatib O, editors. Springer handbook of robotics. Heidelberg: Springer; 2008. p. 1335–48.
Chapter Google Scholar
Wang N, Zeng Y, Geng J. A brief review on safety strategies of physical human-robot interaction. In: ITM Web of Conferences. Vol. 25. EDP Sciences; 2019. p. 01015.
International Organization for Standardization S Geneva. ISO 10218-2:2011 robots and robotic devices—safety requirements for industrial robots—part 2: robot systems and integration. 2016. (Tech Rep).
L Gualtieri. Safety, ergonomics and efficiency in human-robot collaborative assembly: design guidelines and requirements, 30th CIRP Design 2020 (CIRP Design 2020), Industrial engineering and automation.
Schmidt B, Wang L. Vision-guided active collision avoidance for human-robot collaborations. Manuf Lett. 2013;1(1):5–8.
Article Google Scholar
Long P, Chevallereau C, Chablat D, Girin A. An industrial security system for human–robot coexistence. Ind Robot: Int J. 2018;45(2):220–6.
Heydaryan S, SuazaBedolla J, Belingardi G. Safety design and development of a human–robot collaboration assembly process in the automotive industry. Appl Sci. 2018;8(3):344.
Chen Xi. Industrial robot control with object recognition based on deep learning. Procedia CIRP. 2018;76:149–54.
De Luca A, Flacco F. Integrated control for PHRI: collision avoidance, detection, reaction and collaboration. In: 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob). IEEE; 2012. p. 288–95.
Flacco F. A depth space approach for evaluating distance to objects. J Intell Rob Syst. 2014;80(S1):1–16.
Google Scholar
Navarro B, Cherubini A, Fonte A, et al. An iso10218-compliant adaptive damping controller for safe physical human-robot interaction. In: 2016 IEEE International Conference on Robotics and Automation (ICRA). IEEE. 2016. p. 3043–8.
Morato C, Kaipa KN, Zhao B, et al. Toward safe human robot collaboration by using multiple kinects based real-time human tracking. J Comput Inf Sci Eng. 2014;14(1):011006.
Avanzini GB, Ceriani NM, Zanchettin AM, et al. Safety control of industrial robots based on a distributed distance sensor. IEEE Trans Control Syst Technol. 2014;22(6):2127–40.
Bdiwi M, Pfeifer M, Sterzing A. A new strategy for ensuring human safety during various levels of interaction with industrial robots. CIRP Ann. 2017;66(1):453–6.
Heo YJ, Lee W. Collision detection for industrial collaborative robots: a deep learning approach. IEEE Robot Autom Lett. 2019. https://doi.org/10.1109/LRA.2019.2893400 .
Wang XV. Overview of human-robot collaboration in manufacturing. In: Proceedings of the 5th international conference on the industry 4.0 model for advanced manufacturing at: Belgrade, Serbia. 2020. https://doi.org/10.1007/978-3-030-46212-3_2 .
Zhang P, Jin P, Du G, Liu X. Ensuring safety in human–robot coexisting environment based on two-level protection. Ind Robot: Int J. 2016;43(3):264–73.
Schiavi R, Bicchi A, Flacco F. Integration of active and passive compliance control for safe human-robot coexistence. In: 2009 IEEE International Conference on Robotics and Automation. IEEE; 2009. p. 259–64.
De Luca A, Albu-Schaffer A, Haddadin S, et al. Collision detection and safe reaction with the DLR-III lightweight manipulator arm. In: 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE; 2006.
Haddadin S, Albu-Schaffer A, De Luca A, et al. Collision detection and reaction: a contribution to safe physical human-robot interaction. In: 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. IROS 2008. IEEE; 2008. p. 3356–63.
De Benedictis C, Franco W, Maffiodo D, et al. Control of force impulse in human-machine impact. In: International Conference on Robotics in Alpe-Adria Danube Region. Springer. 2017. p. 956–64.
Indri M, Trapani S, Lazzero I. A general procedure for collision detection between an industrial robot and the environment. In: 2015 IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA). IEEE. 2015. p. 1–8.
Lee SD, Song JB. Sensorless collision detection based on friction model for a robot manipulator. Int J Precis Eng Manuf. 2016;17(1):11–7.
Ren T, Dong Y, Wu D, Chen K. Collision detection and identification for robot manipulators based on extended state observer. Control Eng Pract. 2018;79:144–53.
Bortot DF. Ergonomic human-robot coexistence in the branch of production [PhD thesis]. Technische Universität München; 2014.
Fraboni F. Evaluating organizational guidelines for enhancing psychological well being, safety and performance in technology integration. Sustainability. 2023. https://doi.org/10.3390/su15108113 .
Sadrfaridpour B, Wang Y. Collaborative assembly in hybrid manufacturing cells: an integrated framework for human–robot interaction. IEEE Trans Autom Sci Eng. 2018;15(3):1178–92.
Cherubini A, Passama R, Crosnier A, Lasnier A, Fraisse P. Collaborative manufacturing with physical human–robot interaction. Robot Comput-Integr Manuf. 2016;40:1–13.
Dannapfel M, Bruggräf P, Bertram S, Förstmann R, Riegauf A. Systematic planning approach for heavy-duty human–robot cooperation in automotive flow assembly. Int J Electr Electron Eng Telecommun. 2018;7(2):51.
Bluethmann W, Ambrose R, Diftler M, et al. Robonaut: a robot designed to work with humans in space. Auton Robots. 2003;14(2–3):179–97.
Article MATH Google Scholar
Müller R, Vette M, Mailahn O. Process-oriented task assignment for assembly processes with human-robot interaction. Procedia CIRP. 2016;44:210–5.
Maurice P, Padois V, Measson Y, et al. Humanoriented design of collaborative robots. Int J Ind Ergon. 2017;57:88–102.
Tang G, Webb P. The design and evaluation of an ergonomic contactless gesture control system for industrial robots. J Robot. 2018. https://doi.org/10.1155/2018/9791286 .
Faber M, Mertens A, Schlick CM. Cognition-enhanced assembly sequence planning for ergonomic and productive human–robot collaboration in self-optimizing assembly cells. Prod Eng. 2017;11(2):145–54.
Solvang B, Sziebig G. On industrial robots and cognitive info-communication. In: 2012 IEEE 3rd International Conference on Cognitive Infocommunications (CogInfoCom). IEEE; 2012. p. 459–64.
Shravani NK, Rao SB. Introducing robots without creating fear of unemployment and high cost in industries. Int J Eng Technol Sci Res. 2018;5(1):1128–38.
De Santis A. Modelling and control for human-robot interaction: physical and cognitive aspects. In: 2008 IEEE International Conference on Robotics and Automation. IEEE; 2008.
Medina JR, Lorenz T, Hirche S. Synthesizing anticipatory haptic assistance considering human behavior uncertainty. IEEE Trans Robot. 2015;31(1):180–90.
Matsas E, Vosniakos GC, Batras D. Prototyping proactive and adaptive techniques for human–robot collaboration in manufacturing using virtual reality. Robot Comput-Integr Manuf. 2018;5:168–80.
Maurtua I, Ibarguren A, Kildal J, Susperregi L, Sierra B. Human–robot collaboration in industrial applications: safety, interaction and trust. Int J Adv Robot Syst. 2017;14(4):1729881417716010.
Charalambous G, Fletcher S, Webb P. Identifying the key organisational human factors for introducing human–robot collaboration in industry: an exploratory study. Int J Adv Manuf Technol. 2015;81(9–12):2143–55.
Rahman SM, Wang Y. Mutual trust-based subtask allocation for human–robot collaboration in flexible lightweight assembly in manufacturing. Mechatronics. 2018;54:94–109.
Koppenborg M, Nickel P, Naber B, Lungfiel A, Huelke M. Effects of movement speed and predictability in human–robot collaboration. Hum Fact Ergon Manuf Serv Ind. 2017;27(4):197–209.
Download references
Author information
Authors and affiliations.
Department of Mechanical Engineering, National Institute of Technology Warangal, Warangal, 506004, India
Swapnil Patil, V. Vasu & K. V. S. Srinadh
You can also search for this author in PubMed Google Scholar
Contributions
All Authors reviewed the manuscript.
Corresponding author
Correspondence to V. Vasu .
Ethics declarations
Competing interests.
The authors declare no competing interests.
Additional information
Publisher's note.
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/ .
Reprints and permissions
About this article
Patil, S., Vasu, V. & Srinadh, K.V.S. Advances and perspectives in collaborative robotics: a review of key technologies and emerging trends. Discov Mechanical Engineering 2 , 13 (2023). https://doi.org/10.1007/s44245-023-00021-8
Download citation
Received : 31 May 2023
Accepted : 11 August 2023
Published : 29 August 2023
DOI : https://doi.org/10.1007/s44245-023-00021-8
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
- Collaborative robots
- Human Robot Interaction (HRI)
- Collision avoidance
- Contact detection
- Find a journal
- Publish with us
- Track your research
- Open access
- Published: 10 February 2023
Trends and research foci of robotics-based STEM education: a systematic review from diverse angles based on the technology-based learning model
- Darmawansah Darmawansah ORCID: orcid.org/0000-0002-3464-4598 1 ,
- Gwo-Jen Hwang ORCID: orcid.org/0000-0001-5155-276X 1 , 3 ,
- Mei-Rong Alice Chen ORCID: orcid.org/0000-0003-2722-0401 2 &
- Jia-Cing Liang ORCID: orcid.org/0000-0002-1134-527X 1
International Journal of STEM Education volume 10 , Article number: 12 ( 2023 ) Cite this article
22k Accesses
26 Citations
5 Altmetric
Metrics details
Fostering students’ competence in applying interdisciplinary knowledge to solve problems has been recognized as an important and challenging issue globally. This is why STEM (Science, Technology, Engineering, Mathematics) education has been emphasized at all levels in schools. Meanwhile, the use of robotics has played an important role in STEM learning design. The purpose of this study was to fill a gap in the current review of research on Robotics-based STEM (R-STEM) education by systematically reviewing existing research in this area. This systematic review examined the role of robotics and research trends in STEM education. A total of 39 articles published between 2012 and 2021 were analyzed. The review indicated that R-STEM education studies were mostly conducted in the United States and mainly in K-12 schools. Learner and teacher perceptions were the most popular research focus in these studies which applied robots. LEGO was the most used tool to accomplish the learning objectives. In terms of application, Technology (programming) was the predominant robotics-based STEM discipline in the R-STEM studies. Moreover, project-based learning (PBL) was the most frequently employed learning strategy in robotics-related STEM research. In addition, STEM learning and transferable skills were the most popular educational goals when applying robotics. Based on the findings, several implications and recommendations to researchers and practitioners are proposed.
Introduction
Over the past few years, implementation of STEM (Science, Technology, Engineering, and Mathematics) education has received a positive response from researchers and practitioners alike. According to Chesloff ( 2013 ), the winning point of STEM education is its learning process, which validates that students can use their creativity, collaborative skills, and critical thinking skills. Consequently, STEM education promotes a bridge between learning in authentic real-life scenarios (Erdoğan et al., 2016 ; Kelley & Knowles, 2016 ). This is the greatest challenge facing STEM education. The learning experience and real-life situation might be intangible in some areas due to pre- and in-conditioning such as unfamiliarity with STEM content (Moomaw, 2012 ), unstructured learning activities (Sarama & Clements, 2009), and inadequate preparation of STEM curricula (Conde et al., 2021 ).
In response to these issues, the adoption of robotics in STEM education has been encouraged as part of an innovative and methodological approach to learning (Bargagna et al., 2019 ; Ferreira et al., 2018 ; Kennedy et al., 2015 ; Köse et al., 2015 ). Similarly, recent studies have reported that the use of robots in school settings has an impact on student curiosity (Adams et al., 2011 ), arts and craftwork (Sullivan & Bers, 2016 ), and logic (Bers, 2008 ). When robots and educational robotics are considered a core part of STEM education, it offers the possibility to promote STEM disciplines such as engineering concepts or even interdisciplinary practices (Okita, 2014 ). Anwar et. al. ( 2019 ) argued that integration between robots and STEM learning is important to support STEM learners who do not immediately show interest in STEM disciplines. Learner interest can elicit the development of various skills such as computational thinking, creativity and motivation, collaboration and cooperation, problem-solving, and other higher-order thinking skills (Evripidou et al., 2020 ). To some extent, artificial intelligence (AI) has driven the use of robotics and tools, such as their application to designing instructional activities (Hwang et al., 2020 ). The potential for research on robotics in STEM education can be traced by showing the rapid increase in the number of studies over the past few years. The emphasis is on critically reviewing existing research to determine what prior research already tells us about R-STEM education, what it means, and where it can influence future research. Thus, this study aimed to fill the gap by conducting a systematic review to grasp the potential of R-STEM education.
In terms of providing the core concepts of roles and research trends of R-STEM education, this study explored beyond the scope of previous reviews by conducting content analysis to see the whole picture. To address the following questions, this study analyzed published research in the Web of Science database regarding the technology-based learning model (Lin & Hwang, 2019 ):
In terms of research characteristic and features, what were the location, sample size, duration of intervention, research methods, and research foci of the R-STEM education research?
In terms of interaction between participants and robots, what were the participants, roles of the robot, and types of robot in the R-STEM education research?
In terms of application, what were the dominant STEM disciplines, contribution to STEM disciplines, integration of robots and STEM, pedagogical interventions, and educational objectives of the R-STEM research?
- Literature review
Previous studies have investigated the role of robotics in R-STEM education from several research foci such as the specific robot users (Atman Uslu et al., 2022 ; Benitti, 2012 ; Jung & Won, 2018 ; Spolaôr & Benitti, 2017 ; van den Berghe et al., 2019 ), the potential value of R-STEM education (Çetin & Demircan, 2020 ; Conde et al., 2021 ; Zhang et al., 2021 ), and the types of robots used in learning practices (Belpaeme et al., 2018 ; Çetin & Demircan, 2020 ; Tselegkaridis & Sapounidis, 2021 ). While their findings provided a dynamic perspective on robotics, they failed to contribute to the core concept of promoting R-STEM education. Those previous reviews did not summarize the exemplary practice of employing robots in STEM education. For instance, Spolaôr and Benitti ( 2017 ) concluded that robots could be an auxiliary tool for learning but did not convey whether the purpose of using robots is essential to enhance learning outcomes. At the same time, it is important to address the use and purpose of robotics in STEM learning, the connections between theoretical pedagogy and STEM practice, and the reasons for the lack of quantitative research in the literature to measure student learning outcomes.
First, Benitti ( 2012 ) reviewed research published between 2000 and 2009. This review study aimed to determine the educational potential of using robots in schools and found that it is feasible to use most robots to support the pedagogical process of learning knowledge and skills related to science and mathematics. Five years later, Spolaôr and Benitti ( 2017 ) investigated the use of robots in higher education by employing the adopted-learning theories that were not covered in their previous review in 2012. The study’s content analysis approach synthesized 15 papers from 2002 to 2015 that used robots to support instruction based on fundamental learning theory. The main finding was that project-based learning (PBL) and experiential learning, or so-called hands-on learning, were considered to be the most used theories. Both theories were found to increase learners’ motivation and foster their skills (Behrens et al., 2010 ; Jou et al., 2010 ). However, the vast majority of discussions of the selected reviews emphasized positive outcomes while overlooking negative or mixed outcomes. Along the same lines, Jung and Won ( 2018 ) also reviewed theoretical approaches to Robotics education in 47 studies from 2006 to 2017. Their focused review of studies suggested that the employment of robots in learning should be shifted from technology to pedagogy. This review paper argued to determine student engagement in robotics education, despite disagreements among pedagogical traits. Although Jung and Won ( 2018 ) provided information of teaching approaches applied in robotics education, they did not offer critical discussion on how those approaches were formed between robots and the teaching disciplines.
On the other hand, Conde et. al. ( 2021 ) identified PBL as the most common learning approach in their study by reviewing 54 papers from 2006 to 2019. Furthermore, the studies by Çetin and Demircan ( 2020 ) and Tselegkaridis and Sapounidis ( 2021 ) focused on the types of robots used in STEM education and reviewed 23 and 17 papers, respectively. Again, these studies touted learning engagement as a positive outcome, and disregarded the different perspectives of robot use in educational settings on students’ academic performance and cognition. More recently, a meta-analysis by Zhang et. al. ( 2021 ) focused on the effects of robotics on students’ computational thinking and their attitudes toward STEM learning. In addition, a systematic review by Atman Uslu et. al. ( 2022 ) examined the use of educational robotics and robots in learning.
So far, the review study conducted by Atman Uslu et. al. ( 2022 ) could be the only study that has attempted to clarify some of the criticisms of using educational robots by reviewing the studies published from 2006 to 2019 in terms of their research issues (e.g., interventions, interactions, and perceptions), theoretical models, and the roles of robots in educational settings. However, they failed to take into account several important features of robots in education research, such as thematic subjects and educational objectives, for instance, whether robot-based learning could enhance students’ competence of constructing new knowledge, or whether robots could bring either a motivational facet or creativity to pedagogy to foster students’ learning outcomes. These are essential in investigating the trends of technology-based learning research as well as the role of technology in education as a review study is aimed to offer a comprehensive discussion which derived from various angles and dimensions. Moreover, the role of robots in STEM education was generally ignored in the previous review studies. Hence, there is still a need for a comprehensive understanding of the role of robotics in STEM education and research trends (e.g., research issues, interaction issues, and application issues) so as to provide researchers and practitioners with valuable references. That is, our study can remedy the shortcomings of previous reviews (Additional file 1 ).
The above comments demonstrate how previous scholars have understood what they call “the effectiveness of robotics in STEM education” in terms of innovative educational tools. In other words, despite their useful findings and ongoing recommendations, there has not been a thorough investigation of how robots are widely used from all angles. Furthermore, the results of existing review studies have been less than comprehensive in terms of the potential role of robotics in R-STEM education after taking into account various potential dimensions based on the technology-based model that we propose in this study.
The studies in this review were selected from the literature on the Web of Science, our sole database due to its rigorous journal research and qualified studies (e.g., Huang et al., 2022 ), discussing the adoption of R-STEM education, and the data collection procedures for this study followed the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines (Moher et al., 2009 ) as referred to by prior studies (e.g., Chen et al., 2021a , 2021b ; García-Martínez et al., 2020 ). Considering publication quality, previous studies (Fu & Hwang, 2018 ; Martín-Páez et al., 2019 ) suggested using Boolean expressions to search Web of Science databases. The search terms for “robot” are “robot” or “robotics” or “robotics” or “Lego” (Spolaôr & Benitti, 2017 ). According to Martín-Páez et. al. ( 2019 ), expressions for STEM education include “STEM” or “STEM education” or “STEM literacy” or “STEM learning” or “STEM teaching” or “STEM competencies”. These search terms were entered into the WOS database to search only for SSCI papers due to its wide recognition as being high-quality publications in the field of educational technology. As a result, 165 papers were found in the database. The search was then restricted to 2012–2021 as suggested by Hwang and Tsai ( 2011 ). In addition, the number of papers was reduced to 131 by selecting only publications of the “article” type and those written in “English”. Subsequently, we selected the category “education and educational research” which reduced the number to 60 papers. During the coding analysis, the two coders screened out 21 papers unrelated to R-STEM education. The coding result had a Kappa coefficient of 0.8 for both coders (Cohen, 1960 ). After the screening stage, a final total of 39 articles were included in this study, as shown in Fig. 1 . Also, the selected papers are marked with an asterisk in the reference list and are listed in Appendixes 1 and 2 .

PRISMA procedure for the selection process
Theoretical model, data coding, and analysis
This study comprised content analysis using a coding scheme to provide insights into different aspects of the studies in question (Chen et al., 2021a , 2021b ; Martín-Páez et al., 2019 ). The coding scheme adopted the conceptual framework proposed by Lin and Hwang ( 2019 ), comprising “STEM environments”, “learners”, and “robots”, as shown in Fig. 2 . Three issues were identified:
In terms of research issues, five dimensions were included: “location”, “sample size”, “duration of intervention”, (Zhong & Xia, 2020 ) “research methods”, (Johnson & Christensen, 2000 ) and “research foci”. (Hynes et al., 2017 ; Spolaôr & Benitti, 2017 ).
In terms of interaction issues, three dimensions were included: “participants”, (Hwang & Tsai, 2011 ), “roles of the robot”, and “types of robot” (Taylor, 1980 ).
In terms of application, five dimensions were included, namely “dominant STEM disciplines”, “integration of robot and STEM” (Martín‐Páez et al., 2019 ), “contribution to STEM disciplines”, “pedagogical intervention”, (Spolaôr & Benitti, 2017 ) and “educational objectives” (Anwar et al., 2019 ). Table 1 shows the coding items in each dimension of the investigated issues.

Model of R-STEM education theme framework
Figure 3 shows the distribution of the publications selected from 2012 to 2021. The first two publications were found in 2012. From 2014 to 2017, the number of publications steadily increased, with two, three, four, and four publications, respectively. Moreover, R-STEM education has been increasingly discussed within the last 3 years (2018–2020) with six, three, and ten publications, respectively. The global pandemic in the early 2020s could have affected the number of papers published, with only five papers in 2021. This could be due to the fact that most robot-STEM education research is conducted in physical classroom settings.

Number of publications on R-STEM education from 2012 to 2021
Table 2 displays the journals in which the selected papers were published, the number of papers published in each journal, and the journal’s impact factor. It can be concluded that most of the papers on R-STEM education research were published in the Journal of Science Education and Technology , and the International Journal of Technology and Design Education , with six papers, respectively.
Research issues
The geographic distribution of the reviewed studies indicated that more than half of the studies were conducted in the United States (53.8%), while Turkey and China were the location of five and three studies, respectively. Taiwan, Canada, and Italy were indicated to have two studies each. One study each was conducted in Australia, Mexico, and the Netherlands. Figure 4 shows the distribution of the countries where the R-STEM education was conducted.

Locations where the studies were conducted ( N = 39)
Sample size
Regarding sample size, there were four most common sample sizes for the selected period (2012–2021): greater than 80 people (28.21% or 11 out of 39 studies), between 41 and 60 (25.64% or 10 out of 39 studies), 1 to 20 people (23.08% or 9 out of 39), and between 21 and 40 (20.51% or 8 out of 39 studies). The size of 61 to 80 people (2.56% or 1 out of 39 studies) was the least popular sample size (see Fig. 5 ).

Sample size across the studies ( N = 39)
Duration of intervention
Regarding the duration of the study (see Fig. 6 ), experiments were mostly conducted for less than or equal to 4 weeks (35.9% or 14 out of 39 studies). This was followed by less than or equal to 8 weeks (25.64% or 10 out of 39 studies), less than or equal to 6 months (20.51% or 8 out 39 studies), less than or equal to 12 months (10.26% or 4 out of 39 studies), while less than or equal to 1 day (7.69% or 3 out of 39 studies) was the least chosen duration.

Duration of interventions across the studies ( N = 39)
Research methods
Figure 7 demonstrates the trends in research methods from 2012 to 2021. The use of questionnaires or surveys (35.9% or 14 out of 39 studies) and mixed methods research (35.9% or 14 out of 39 studies) outnumbered other methods such as experimental design (25.64% or 10 out of 39 studies) and system development (2.56% or 1 out of 39 studies).

Frequency of each research method used in 2012–2021
Research foci
In these studies, research foci were divided into four aspects: cognition, affective, operational skill, and learning behavior. If the study involved more than one research focus, each issue was coded under each research focus.
In terms of cognitive skills, students’ learning performance was the most frequently measured (15 out of 39 studies). Six studies found that R-STEM education brought a positive result to learning performance. Two studies did not find any significant difference, while five studies showed mixed results or found that it depends. For example, Chang and Chen ( 2020 ) revealed that robots in STEM learning improved students’ cognition such as designing, electronic components, and computer programming.
In terms of affective skills, just over half of the reviewed studies (23 out of 39, 58.97%) addressed the students’ or teachers’ perceptions of employing robots in STEM education, of which 14 studies showed positive perceptions. In contrast, nine studies found mixed results. For instance, Casey et. al. ( 2018 ) determined students’ mixed perceptions of the use of robots in learning coding and programming.
Five studies were identified regarding operational skills by investigating students’ psychomotor aspects such as construction and mechanical elements (Pérez & López, 2019 ; Sullivan & Bers, 2016 ) and building and modeling robots (McDonald & Howell, 2012 ). Three studies found positive results, while two reported mixed results.
In terms of learning behavior, five out of 39 studies measured students’ learning behavior, such as students’ engagement with robots (Ma et al., 2020 ), students’ social behavior while interacting with robots (Konijn & Hoorn, 2020 ), and learner–parent interactions with interactive robots (Phamduy et al., 2017 ). Three studies showed positive results, while two found mixed results or found that it depends (see Table 3 ).
Interaction issues
Participants.
Regarding the educational level of the participants, elementary school students (33.33% or 13 studies) were the most preferred study participants, followed by high school students (15.38% or 6 studies). The data were similar for preschool, junior high school, in-service teachers, and non-designated personnel (10.26% or 4 studies). College students, including pre-service teachers, were the least preferred study participants. Interestingly, some studies involved study participants from more than one educational level. For example, Ucgul and Cagiltay ( 2014 ) conducted experiments with elementary and middle school students, while Chapman et. al. ( 2020 ) investigated the effectiveness of robots with elementary, middle, and high school students. One study exclusively investigated gifted and talented students without reporting their levels of education (Sen et al., 2021 ). Figure 8 shows the frequency of study participants between 2012 and 2021.

Frequency of research participants in the selected period
The roles of robot
For the function of robots in STEM education, as shown in Fig. 9 , more than half of the selected articles used robots as tools (31 out of 39 studies, 79.49%) for which the robots were designed to foster students’ programming ability. For instance, Barker et. al. ( 2014 ) investigated students’ building and programming of robots in hands-on STEM activities. Seven out of 39 studies used robots as tutees (17.95%), with the aim of students and teachers learning to program. For example, Phamduy et. al. ( 2017 ) investigated a robotic fish exhibit to analyze visitors’ experience of controlling and interacting with the robot. The least frequent role was tutor (2.56%), with only one study which programmed the robot to act as tutor or teacher for students (see Fig. 9 ).

Frequency of roles of robots
Types of robot
Furthermore, in terms of the types of robots used in STEM education, the LEGO MINDSTORMS robot was the most used (35.89% or 14 out of 39 studies), while Arduino was the second most used (12.82% or 5 out of 39 studies), and iRobot Create (5.12% or 2 out of 39 studies), and NAO (5.12% or 2 out of 39 studies) ranked third equal, as shown in Fig. 10 . LEGO was used to solve STEM problem-solving tasks such as building bridges (Convertini, 2021 ), robots (Chiang et al., 2020 ), and challenge-specific game boards (Leonard et al., 2018 ). Furthermore, four out of 36 studies did not specify the robots used in their studies.

Frequency of types of robots used
Application issues
The dominant disciplines and the contribution to stem disciplines.
As shown in Table 4 , the most dominant discipline in R-STEM education research published from 2012 to 2021 was technology. Engineering, mathematics, and science were the least dominant disciplines. Programming was the most common subject for robotics contribution to the STEM disciplines (25 out of 36 studies, 64.1%), followed by engineering (12.82%), and mathematical method (12.82%). We found that interdisciplinary was discussed in the selected period, but in relatively small numbers. However, this finding is relevant to expose the use of robotics in STEM disciplines as a whole. For example, Barker et. al. ( 2014 ) studied how robotics instructional modules in geospatial and programming domains could be impacted by fidelity adherence and exposure to the modules. The dominance of STEM subjects based on robotics makes it necessary to study the way robotics and STEM are integrated into the learning process. Therefore, the forms of STEM integration are discussed in the following sub-section to report how teaching and learning of these disciplines can have learning goals in an integrated STEM environment.
Integration of robots and STEM
There are three general forms of STEM integration (see Fig. 11 ). Of these studies, robot-STEM content integration was commonly used (22 studies, 56.41%), in which robot activities had multiple STEM disciplinary learning objectives. For example, Chang and Chen ( 2020 ) employed Arduino in a robotics sailboat curriculum. This curriculum was a cross-disciplinary integration, the objectives of which were understanding sailboats and sensors (Science), the direction of motors and mechanical structures (Engineering), and control programming (Technology). The second most common form was supporting robot-STEM content integration (12 out of 39 studies, 30.76%). For instance, KIBO robots were used in the robotics activities where the mechanical elements content area was meaningfully covered in support of the main programming learning objectives (Sullivan & Bers, 2019 ). The least common form was robot-STEM context integration (5 out of 39 studies, 12.82%) which was implemented through the robot to situate the disciplinary content goals in another discipline’s practices. For example, Christensen et. al. ( 2015 ) analyzed the impact of an after-school program that offered robots as part of students’ challenges in a STEM competition environment (geoscience and programming).

The forms of robot-STEM integration
Pedagogical interventions
In terms of instructional interventions, as shown in Fig. 12 , project-based learning (PBL) was the preferred instructional theory for using robots in R-STEM education (38.46% or 15 out 39 studies), with the aim of motivating students or robot users in the STEM learning activities. For example, Pérez and López ( 2019 ) argued that using low-cost robots in the teaching process increased students’ motivation and interest in STEM areas. Problem-based learning was the second most used intervention in this dimension (17.95% or 7 out of 39 studies). It aimed to improve students’ motivation by giving them an early insight into practical Engineering and Technology. For example, Gomoll et. al. ( 2017 ) employed robots to connect students from two different areas to work collaboratively. Their study showed the importance of robotic engagement in preliminary learning activities. Edutainment (12.82% or 5 out of 39 studies) was the third most used intervention. This intervention was used to bring together students and robots and to promote learning by doing. Christensen et. al. ( 2015 ) and Phamduy et. al. ( 2017 ) were the sample studies that found the benefits of hands-on and active learning engagement; for example, robotics competitions and robotics exhibitions could help retain a positive interest in STEM activities.

The pedagogical interventions in R-STEM education
Educational objectives
As far as the educational objectives of robots are concerned (see Fig. 13 ), the majority of robots are used for learning and transfer skills (58.97% or 23 out of 39 studies) to enhance students’ construction of new knowledge. It emphasized the process of learning through inquiry, exploration, and making cognitive associations with prior knowledge. Chang and Chen’s ( 2020 ) is a sample study on how learning objectives promote students’ ability to transfer science and engineering knowledge learned through science experiments to design a robotics sailboat that could navigate automatically as a novel setting. Moreover, it also explicitly aimed to examine the hands-on learning experience with robots. For example, McDonald and Howell ( 2012 ) described how robots engaged with early year students to better understand the concepts of literacy and numeracy.

Educational objectives of R-STEM education
Creativity and motivation were found to be educational objectives in R-STEM education for seven out of 39 studies (17.94%). It was considered from either the motivational facet of social trend or creativity in pedagogy to improve students’ interest in STEM disciplines. For instance, these studies were driven by the idea that employing robots could develop students’ scientific creativity (Guven et al., 2020 ), confidence and presentation ability (Chiang et al., 2020 ), passion for college and STEM fields (Meyers et al., 2012 ), and career choice (Ayar, 2015 ).
The general benefits of educational robots and the professional development of teachers were equally found in four studies each. The first objective, the general benefits of educational robotics, was to address those studies that found a broad benefit of using robots in STEM education without highlighting the particular focus. The sample studies suggested that robotics in STEM could promote active learning and improve students’ learning experience through social interaction (Hennessy Elliott, 2020 ) and collaborative science projects (Li et al., 2016 ). The latter, teachers’ professional development, was addressed by four studies (10.25%) to utilize robots to enhance teachers’ efficacy. Studies in this category discussed how teachers could examine and identify distinctive instructional approaches with robotics work (Bernstein et al., 2022 ), design meaningful learning instruction (Ryan et al., 2017 ) and lesson materials (Kim et al., 2015 ), and develop more robust cultural responsive self-efficacy (Leonard et al., 2018 ).
This review study was conducted using content analysis from the WOS collection of research on robotics in STEM education from 2012 to 2021. The findings are discussed under the headings of each research question.
RQ 1: In terms of research, what were the location, sample size, duration of intervention, research methods, and research foci of the R-STEM education research?
About half of the studies were conducted in North America (the USA and Canada), while limited studies were found from other continents (Europe and the Asia Pacific). This trend was identified in the previous study on robotics for STEM activities (Conde et al., 2021 ). Among 39 studies, 28 (71.79%) had fewer than 80 participants, while 11 (28.21%) had more than 80 participants. The intervention’s duration across the studies was almost equally divided between less than or equal to a month (17 out of 39 studies, 43.59%) and more than a month (22 out of 39 studies, 56.41%). The rationale behind the most popular durations is that these studies were conducted in classroom experiments and as conditional learning. For example, Kim et. al. ( 2018 ) conducted their experiments in a course offered at a university where it took 3 weeks based on a robotics module.
A total of four different research methodologies were adopted in the studies, the two most popular being mixed methods (35.89%) and questionnaires or surveys (35.89%). Although mixed methods can be daunting and time-consuming to conduct (Kucuk et al., 2013 ), the analysis found that it was one of the most used methods in the published articles, regardless of year. Chang and Chen ( 2022 ) embedded a mixed-methods design in their study to qualitatively answer their second research question. The possible reason for this is that other researchers prefer to use mixed methods as their research design. Their main research question was answered quantitatively, while the second and remaining research questions were reported through qualitative analysis (Casey et al., 2018 ; Chapman et al., 2020 ; Ma et al., 2020 ; Newton et al., 2020 ; Sullivan & Bers, 2019 ). Thus, it was concluded that mixed methods could lead to the best understanding and integration of research questions (Creswell & Clark, 2013 ; Creswell et al., 2003 ).
In contrast, system development was the least used compared to other study designs, as most studies used existing robotic systems. It should be acknowledged that the most common outcome we found was to enable students to understand these concepts as they relate to STEM subjects. Despite the focus on system development, the help of robotics was identified as increasing the success of STEM learning (Benitti, 2012 ). Because limited studies focused on system development as their primary purpose (1 out of 39 studies, 2.56%), needs analyses may ask whether the mechanisms, types, and challenges of robotics are appropriate for learners. Future research will need further design and development of personalized robots to fill this part of the research gap.
About half of the studies (23 studies, 58.97%) were focused on investigating the effectiveness of robots in STEM learning, primarily by collecting students’ and teachers’ opinions. This result is more similar to Belpaeme et al. ( 2018 ) finding that users’ perceptions were common measures in studies on robotics learning. However, identifying perceptions of R-STEM education may not help us understand exactly how robots’ specific features afford STEM learning. Therefore, it is argued that researchers should move beyond such simple collective perceptions in future research. Instead, further studies may compare different robots and their features. For instance, whether robots with multiple sensors, a sensor, or without a sensor could affect students’ cognitive, metacognitive, emotional, and motivational in STEM areas (e.g., Castro et al., 2018 ). Also, there could be instructional strategies embedded in R-STEM education that can lead students to do high-order thinking, such as problem-solving with a decision (Özüorçun & Bicen, 2017 ), self-regulated and self-engagement learning (e.g., Li et al., 2016 ). Researchers may also compare the robotics-based approach with other technology-based approaches (e.g., Han et al., 2015 ; Hsiao et al., 2015 ) in supporting STEM learning.
RQ 2: In terms of interaction, what were the participants, roles of the robots, and types of robots of the R-STEM education research?
The majority of reviewed studies on R-STEM education were conducted with K-12 students (27 studies, 69.23%), including preschool, elementary school, junior, and high school students. There were limited studies that involved higher education students and teachers. This finding is similar to the previous review study (Atman Uslu et al., 2022 ), which found a wide gap among research participants between K-12 students and higher education students, including teachers. Although it is unclear why there were limited studies conducted involving teachers and higher education students, which include pre-service teachers, we are aware of the critical task of designing meaningful R-STEM learning experiences which is likely to require professional development. In this case, both pre- and in-service teachers could examine specific objectives, identify topics, test the application, and design potential instruction to align well with robots in STEM learning (Bernstein et al., 2022 ). Concurrently, these pedagogical content skills in R-STEM disciplines might not be taught in the traditional pre-service teacher education and particular teachers’ development program (Huang et al., 2022 ). Thus, it is recommended that future studies could be conducted to understand whether robots can improve STEM education for higher education students and teachers professionally.
Regarding the role of robots, most were used as learning tools (31 studies, 79.48%). These robots are designed to have the functional ability to command or program some analysis and processing (Taylor, 1980 ). For example, Leonard et. al. ( 2018 ) described how pre-service teachers are trained in robotics activities to facilitate students’ learning of computational thinking. Therefore, robots primarily provide opportunities for learners to construct knowledge and skills. Only one study (2.56%), however, was found to program robots to act as tutors or teachers for students. Designing a robot-assisted system has become common in other fields such as language learning (e.g., Hong et al., 2016 ; Iio et al., 2019 ) and special education (e.g., Özdemir & Karaman, 2017 ) where the robots instruct the learning activities for students. In contrast, R-STEM education has not looked at the robot as a tutor, but has instead focused on learning how to build robots (Konijn & Hoorn, 2020 ). It is argued that robots with features as human tutors, such as providing personalized guidance and feedback, could assist during problem-solving activities (Fournier-Viger et al., 2013 ). Thus, it is worth exploring in what teaching roles the robot will work best as a tutor in STEM education.
When it comes to types of robots, the review found that LEGO dominated robots’ employment in STEM education (15 studies, 38.46%), while the other types were limited in their use. It is considered that LEGO tasks are more often associated with STEM because learners can be more involved in the engineering or technical tasks. Most researchers prefer to use LEGO in their studies (Convertini, 2021 ). Another interesting finding is about the cost of the robots. Although robots are generally inexpensive, some products are particularly low-cost and are commonly available in some regions (Conde et al., 2021 ). Most preferred robots are still considered exclusive learning tools in developing countries and regions. In this case, only one study offered a low-cost robot (Pérez & López, 2019 ). This might be a reason why the selected studies were primarily conducted in the countries and continents where the use of advanced technologies, such as robots, is growing rapidly (see Fig. 4 ). Based on this finding, there is a need for more research on the use of low-cost robots in R-STEM instruction in the least developed areas or regions of the world. For example, Nel et. al. ( 2017 ) designed a STEM program to build and design a robot which exclusively enabling students from low-income household to participate in the R-STEM activities.
RQ 3: In terms of application, what were the dominant STEM disciplines, contribution to STEM disciplines, integration of robots and STEM, pedagogical interventions, and educational objectives of the R-STEM research?
While Technology and Engineering are the dominant disciplines, this review found several studies that directed their research to interdisciplinary issues. The essence of STEM lies in interdisciplinary issues that integrate one discipline into another to create authentic learning (Hansen, 2014 ). This means that some researchers are keen to develop students’ integrated knowledge of Science, Technology, Engineering, and Mathematics (Chang & Chen, 2022 ; Luo et al., 2019 ). However, Science and Mathematics were given less weight in STEM learning activities compared to Technology and Engineering. This issue has been frequently reported as a barrier to implementing R-STEM in the interdisciplinary subject. Some reasons include difficulties in pedagogy and classroom roles, lack of curriculum integration, and a limited opportunity to embody one learning subject into others (Margot & Kettler, 2019 ). Therefore, further research is encouraged to treat these disciplines equally, so is the way of STEM learning integration.
The subject-matter results revealed that “programming” was the most common research focus in R-STEM research (25 studies). Researchers considered programming because this particular topic was frequently emphasized in their studies (Chang & Chen, 2020 , 2022 ; Newton et al., 2020 ). Similarly, programming concepts were taught through support robots for kindergarteners (Sullivan & Bers, 2019 ), girls attending summer camps (Chapman et al., 2020 ), and young learners with disabilities (Lamptey et al., 2021 ). Because programming simultaneously accompanies students’ STEM learning, we believe future research can incorporate a more dynamic and comprehensive learning focus. Robotics-based STEM education research is expected to encounter many interdisciplinary learning issues.
Researchers in the reviewed studies agreed that the robot could be integrated with STEM learning with various integration forms. Bryan et. al. ( 2015 ) argued that robots were designed to develop multiple learning goals from STEM knowledge, beginning with an initial learning context. It is parallel with our finding that robot-STEM content integration was the most common integration form (22 studies, 56.41%). In this form, studies mainly defined their primary learning goals with one or more anchor STEM disciplines (e.g., Castro et al., 2018 ; Chang & Chen, 2020 ; Luo et al., 2019 ). The learning goals provided coherence between instructional activities and assessments that explicitly focused on the connection among STEM disciplines. As a result, students can develop a deep and transferable understanding of interdisciplinary phenomena and problems through emphasizing the content across disciplines (Bryan et al., 2015 ). However, the findings on learning instruction and evaluation in this integration are inconclusive. A better understanding of the embodiment of learning contexts is needed, for instance, whether instructions are inclusive, socially relevant, and authentic in the situated context. Thus, future research is needed to identify the quality of instruction and evaluation and the specific characteristics of robot-STEM integration. This may place better provision of opportunities for understanding the form of pedagogical content knowledge to enhance practitioners’ self-efficacy and pedagogical beliefs (Chen et al., 2021a , 2021b ).
Project-based learning (PBL) was the most used instructional intervention with robots in R-STEM education (15 studies, 38.46%). Blumenfeld et al. ( 1991 ) credited PBL with the main purpose of engaging students in investigating learning models. In the case of robotics, students can create robotic artifacts (Spolaôr & Benitti, 2017 ). McDonald and Howell ( 2012 ) used robotics to develop technological skills in lower grades. Leonard et. al. ( 2016 ) used robots to engage and develop students’ computational thinking strategies in another example. In the aforementioned study, robots were used to support learning content in informal education, and both teachers and students designed robotics experiences aligned with the curriculum (Bernstein et al., 2022 ). As previously mentioned, this study is an example of how robots can cover STEM content from the learning domain to support educational goals.
The educational goal of R-STEM education was the last finding of our study. Most of the reviewed studies focused on learning and transferable skills as their goals (23 studies, 58.97%). They targeted learning because the authors investigated the effectiveness of R-STEM learning activities (Castro et al., 2018 ; Convertini, 2021 ; Konijn & Hoorn, 2020 ; Ma et al., 2020 ) and conceptual knowledge of STEM disciplines (Barak & Assal, 2018 ; Gomoll et al., 2017 ; Jaipal-Jamani & Angeli 2017 ). They targeted transferable skills because they require learners to develop individual competencies in STEM skills (Kim et al., 2018 ; McDonald & Howell, 2012 ; Sullivan & Bers, 2016 ) and to master STEM in actual competition-related skills (Chiang et al., 2020 ; Hennessy Elliott, 2020 ).
Conclusions and implications
The majority of the articles examined in this study referred to theoretical frameworks or certain applications of pedagogical theories. This finding contradicts Atman Uslu et. al. ( 2022 ), who concluded that most of the studies in this domain did not refer to pedagogical approaches. Although we claim the employment pedagogical frameworks in the examined articles exist, those articles primarily did not consider a strict instructional design when employing robots in STEM learning. Consequently, the discussions in the studies did not include how the learning–teaching process affords students’ positive perceptions. Therefore, both practitioners and researchers should consider designing learning instruction using robots in STEM education. To put an example, the practitioners may regard students’ zone of proximal development (ZPD) when employing robot in STEM tasks. Giving an appropriate scaffolding and learning contents are necessary for them to enhance their operational skills, application knowledge and emotional development. Although the integration between robots and STEM education was founded in the reviewed studies, it is worth further investigating the disciplines in which STEM activities have been conducted. This current review found that technology and engineering were the subject areas of most concern to researchers, while science and mathematics did not attract as much attention. This situation can be interpreted as an inadequate evaluation of R-STEM education. In other words, although those studies aimed at the interdisciplinary subject, most assessments and evaluations were monodisciplinary and targeted only knowledge. Therefore, it is necessary to carry out further studies in these insufficient subject areas to measure and answer the potential of robots in every STEM field and its integration. Moreover, the broadly consistent reporting of robotics generally supporting STEM content could impact practitioners only to employ robots in the mainstream STEM educational environment. Until that point, very few studies had investigated the prominence use of robots in various and large-scale multidiscipline studies (e.g., Christensen et al., 2015 ).
Another finding of the reviewed studies was the characteristic of robot-STEM integration. Researchers and practitioners must first answer why and how integrated R-STEM could be embodied in the teaching–learning process. For example, when robots are used as a learning tool to achieve STEM learning objectives, practitioners are suggested to have application knowledge. At the same time, researchers are advised to understand the pedagogical theories so that R-STEM integration can be flexibly merged into learning content. This means that the learning design should offer students’ existing knowledge of the immersive experience in dealing with robots and STEM activities that assist them in being aware of their ideas, then building their knowledge. In such a learning experience, students will understand the concept of STEM more deeply by engaging with robots. Moreover, demonstration of R-STEM learning is not only about the coherent understanding of the content knowledge. Practitioners need to apply both flexible subject-matter knowledge (e.g., central facts, concepts and procedures in the core concept of knowledge), and pedagogical content knowledge, which specific knowledge of approaches that are suitable for organizing and delivering topic-specific content, to the discipline of R-STEM education. Consequently, practitioners are required to understand the nature of robots and STEM through the content and practices, for example, taking the lead in implementing innovation through subject area instruction, developing collaboration that enriches R-STEM learning experiences for students, and being reflective practitioners by using students’ learning artifacts to inform and revise practices.
Limitations and recommendations for future research
Overall, future research could explore the great potential of using robots in education to build students’ knowledge and skills when pursuing learning objectives. It is believed that the findings from this study will provide insightful information for future research.
The articles reviewed in this study were limited to journals indexed in the WOS database and R-STEM education-related SSCI articles. However, other databases and indexes (e.g., SCOPUS, and SCI) could be considered. In addition, the number of studies analyzed was relatively small. Further research is recommended to extend the review duration to cover the publications in the coming years. The results of this review study have provided directions for the research area of STEM education and robotics. Specifically, robotics combined with STEM education activities should aim to foster the development of creativity. Future research may aim to develop skills in specific areas such as robotics STEM education combined with the humanities, but also skills in other humanities disciplines across learning activities, social/interactive skills, and general guidelines for learners at different educational levels. Educators can design career readiness activities to help learners build self-directed learning plans.
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
Abbreviations
Science, technology, engineering, and mathematics
Robotics-based STEM
Project-based learning
References marked with an asterisk indicate studies included in the systematic review
Adams, R., Evangelou, D., English, L., De Figueiredo, A. D., Mousoulides, N., Pawley, A. L., Schiefellite, C., Stevens, R., Svinicki, M., Trenor, J. M., & Wilson, D. M. (2011). Multiple perspectives on engaging future engineers. Journal of Engineering Education, 100 (1), 48–88. https://doi.org/10.1002/j.2168-9830.2011.tb00004.x
Article Google Scholar
Anwar, S., Bascou, N. A., Menekse, M., & Kardgar, A. (2019). A systematic review of studies on educational robotics. Journal of Pre-College Engineering Education Research (j-PEER), 9 (2), 19–24. https://doi.org/10.7771/2157-9288.1223
Atman Uslu, N., Yavuz, G. Ö., & KoçakUsluel, Y. (2022). A systematic review study on educational robotics and robots. Interactive Learning Environments . https://doi.org/10.1080/10494820.2021.2023890
*Ayar, M. C. (2015). First-hand experience with engineering design and career interest in engineering: An informal STEM education case study. Educational Sciences Theory & Practice, 15 (6), 1655–1675. https://doi.org/10.12738/estp.2015.6.0134
*Barak, M., & Assal, M. (2018). Robotics and STEM learning: Students’ achievements in assignments according to the P3 Task Taxonomy—Practice, problem solving, and projects. International Journal of Technology and Design Education, 28 (1), 121–144. https://doi.org/10.1007/s10798-016-9385-9
Bargagna, S., Castro, E., Cecchi, F., Cioni, G., Dario, P., Dell’Omo, M., Di Lieto, M. C., Inguaggiato, E., Martinelli, A., Pecini, C., & Sgandurra, G. (2019). Educational robotics in down syndrome: A feasibility study. Technology, Knowledge and Learning, 24 (2), 315–323. https://doi.org/10.1007/s10758-018-9366-z
*Barker, B. S., Nugent, G., & Grandgenett, N. F. (2014). Examining fidelity of program implementation in a STEM-oriented out-of-school setting. International Journal of Technology and Design Education, 24 (1), 39–52. https://doi.org/10.1007/s10798-013-9245-9
Behrens, A., Atorf, L., Schwann, R., Neumann, B., Schnitzler, R., Balle, J., Herold, T., Telle, A., Noll, T. G., Hameyer, K., & Aach, T. (2010). MATLAB meets LEGO Mindstorms—A freshman introduction course into practical engineering. IEEE Transactions on Education, 53 (2), 306–317. https://doi.org/10.1109/TE.2009.2017272
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati, B., Tanaka, F. (2018). Social robots for education: A review. Science Robotics, 3 (21), eaat5954. https://doi.org/10.1126/scirobotics.aat5954
Benitti, F. B. V. (2012). Exploring the educational potential of robotics in schools: A systematic review. Computers & Education, 58 (3), 978–988. https://doi.org/10.1016/j.compedu.2011.10.006
*Bernstein, D., Mutch-Jones, K., Cassidy, M., & Hamner, E. (2022). Teaching with robotics: Creating and implementing integrated units in middle school subjects. Journal of Research on Technology in Education . https://doi.org/10.1080/15391523.2020.1816864
Bers, M. U. (2008). Blocks to robots learning with technology in the early childhood classroom . Teachers College Press.
Google Scholar
Blumenfeld, P. C., Soloway, E., Marx, R. W., Krajcik, J. S., Guzdial, M., & Palincsar, A. (1991). Motivating project-based learning: sustaining the doing, supporting the learning. Educational Psychologist, 26 (3–4), 369–398. https://doi.org/10.1080/00461520.1991.9653139
Bryan, L. A., Moore, T. J., Johnson, C. C., & Roehrig, G. H. (2015). Integrated STEM education. In C. C. Johnson, E. E. Peters-Burton, & T. J. Moore (Eds.), STEM road map: A framework for integrated STEM education (pp. 23–37). Routledge.
Chapter Google Scholar
*Casey, J. E., Gill, P., Pennington, L., & Mireles, S. V. (2018). Lines, roamers, and squares: Oh my! using floor robots to enhance Hispanic students’ understanding of programming. Education and Information Technologies, 23 (4), 1531–1546. https://doi.org/10.1007/s10639-017-9677-z
*Castro, E., Cecchi, F., Valente, M., Buselli, E., Salvini, P., & Dario, P. (2018). Can educational robotics introduce young children to robotics and how can we measure it?. Journal of Computer Assisted Learning, 34 (6), 970–977. https://doi.org/10.1111/jcal.12304
Çetin, M., & Demircan, H. Ö. (2020). Empowering technology and engineering for STEM education through programming robots: A systematic literature review. Early Child Development and Care, 190 (9), 1323–1335. https://doi.org/10.1080/03004430.2018.1534844
*Chang, C. C., & Chen, Y. (2020). Cognition, attitude, and interest in cross-disciplinary i-STEM robotics curriculum developed by thematic integration approaches of webbed and threaded models: A concurrent embedded mixed methods study. Journal of Science Education and Technology, 29 , 622–634. https://doi.org/10.1007/s10956-020-09841-9
*Chang, C. C., & Chen, Y. (2022). Using mastery learning theory to develop task-centered hands-on STEM learning of Arduino-based educational robotics: Psychomotor performance and perception by a convergent parallel mixed method. Interactive Learning Environments . https://doi.org/10.1080/10494820.2020.1741400
*Chapman, A., Rodriguez, F. D., Pena, C., Hinojosa, E., Morales, L., Del Bosque, V., Tijerina, Y., & Tarawneh, C. (2020). “Nothing is impossible”: Characteristics of Hispanic females participating in an informal STEM setting. Cultural Studies of Science Education, 15 , 723–737. https://doi.org/10.1007/s11422-019-09947-6
Chen, M. R. A., Hwang, G. J., Majumdar, R., Toyokawa, Y., & Ogata, H. (2021a). Research trends in the use of E-books in English as a foreign language (EFL) education from 2011 to 2020: A bibliometric and content analysis. Interactive Learning Environments . https://doi.org/10.1080/10494820.2021.1888755
Chen, Y. L., Huang, L. F., & Wu, P. C. (2021b). Preservice preschool teachers’ self-efficacy in and need for STEM education professional development: STEM pedagogical belief as a mediator. Early Childhood Education Journal, 49 (2), 137–147.
Chesloff, J. D. (2013). STEM education must start in early childhood. Education Week, 32 (23), 27–32.
*Chiang, F. K., Liu, Y. Q., Feng, X., Zhuang, Y., & Sun, Y. (2020). Effects of the world robot Olympiad on the students who participate: A qualitative study. Interactive Learning Environments . https://doi.org/10.1080/10494820.2020.1775097
*Christensen, R., Knezek, G., & Tyler-Wood, T. (2015). Alignment of hands-on STEM engagement activities with positive STEM dispositions in secondary school students. Journal of Science Education and Technology, 24 (6), 898–909. https://doi.org/10.1007/s10956-015-9572-6
Cohen, J. (1960). A coefficient of agreement for nominal scales. Educational and Psychological Measurement, 20 , 37–46. https://doi.org/10.1177/001316446002000104
Conde, M. Á., Rodríguez-Sedano, F. J., Fernández-Llamas, C., Gonçalves, J., Lima, J., & García-Peñalvo, F. J. (2021). Fostering STEAM through challenge-based learning, robotics, and physical devices: A systematic mapping literature review. Computer Applications in Engineering Education, 29 (1), 46–65. https://doi.org/10.1002/cae.22354
*Convertini, J. (2021). An interdisciplinary approach to investigate preschool children’s implicit inferential reasoning in scientific activities. Research in Science Education, 51 (1), 171–186. https://doi.org/10.1007/s11165-020-09957-3
Creswell, J. W., & Clark, V. L. P. (2013). Designing and conducting mixed methods research (3rd ed.). Thousand Oaks: Sage Publications Inc.
Creswell, J. W., Plano-Clark, V. L., Gutmann, M. L., & Hanson, W. E. (2003). Advanced mixed methods research designs. Handbook of mixed methods in social and behavioral research. Sage.
Erdoğan, N., Navruz, B., Younes, R., & Capraro, R. M. (2016). Viewing how STEM project-based learning influences students’ science achievement through the implementation lens: A latent growth modeling. EURASIA Journal of Mathematics, Science & Technology Education, 12 (8), 2139–2154. https://doi.org/10.12973/eurasia.2016.1294a
Evripidou, S., Georgiou, K., Doitsidis, L., Amanatiadis, A. A., Zinonos, Z., & Chatzichristofis, S. A. (2020). Educational robotics: Platforms, competitions and expected learning outcomes. IEEE Access, 8 , 219534–219562. https://doi.org/10.1109/ACCESS.2020.3042555
Ferreira, N. F., Araujo, A., Couceiro, M. S., & Portugal, D. (2018). Intensive summer course in robotics–Robotcraft. Applied Computing and Informatics, 16 (1/2), 155–179. https://doi.org/10.1016/j.aci.2018.04.005
Fournier-Viger, P., Nkambou, R., Nguifo, E. M., Mayers, A., & Faghihi, U. (2013). A multiparadigm intelligent tutoring system for robotic arm training. IEEE Transactions on Learning Technologies, 6 (4), 364–377. https://doi.org/10.1109/TLT.2013.27
Fu, Q. K., & Hwang, G. J. (2018). Trends in mobile technology-supported collaborative learning: A systematic review of journal publications from 2007 to 2016. Computers & Education, 119 , 129–143. https://doi.org/10.1016/j.compedu.2018.01.004
García-Martínez, I., Tadeu, P., Montenegro-Rueda, M., & Fernández-Batanero, J. M. (2020). Networking for online teacher collaboration. Interactive Learning Environments . https://doi.org/10.1080/10494820.2020.1764057
*Gomoll, A., Hmelo-Silver, C. E., Šabanović, S., & Francisco, M. (2016). Dragons, ladybugs, and softballs: Girls’ STEM engagement with human-centered robotics. Journal of Science Education and Technology, 25 (6), 899–914. https://doi.org/10.1007/s10956-016-9647-z
*Gomoll, A. S., Hmelo-Silver, C. E., Tolar, E., Šabanovic, S., & Francisco, M. (2017). Moving apart and coming together: Discourse, engagement, and deep learning. Educational Technology and Society, 20 (4), 219–232.
*Guven, G., KozcuCakir, N., Sulun, Y., Cetin, G., & Guven, E. (2020). Arduino-assisted robotics coding applications integrated into the 5E learning model in science teaching. Journal of Research on Technology in Education . https://doi.org/10.1080/15391523.2020.1812136
Han, J., Jo, M., Hyun, E., & So, H. J. (2015). Examining young children’s perception toward augmented reality-infused dramatic play. Educational Technology Research and Development, 63 (3), 455–474. https://doi.org/10.1007/s11423-015-9374-9
Hansen, M. (2014). Characteristics of schools successful in STEM: Evidence from two states’ longitudinal data. Journal of Educational Research, 107 (5), 374–391. https://doi.org/10.1080/00220671.2013.823364
*Hennessy Elliott, C. (2020). “Run it through me:” Positioning, power, and learning on a high school robotics team. Journal of the Learning Sciences, 29 (4–5), 598–641. https://doi.org/10.1080/10508406.2020.1770763
Hong, Z. W., Huang, Y. M., Hsu, M., & Shen, W. W. (2016). Authoring robot-assisted instructional materials for improving learning performance and motivation in EFL classrooms. Journal of Educational Technology & Society, 19 (1), 337–349.
Hsiao, H. S., Chang, C. S., Lin, C. Y., & Hsu, H. L. (2015). “iRobiQ”: The influence of bidirectional interaction on kindergarteners’ reading motivation, literacy, and behavior. Interactive Learning Environments, 23 (3), 269–292. https://doi.org/10.1080/10494820.2012.745435
Huang, B., Jong, M. S. Y., Tu, Y. F., Hwang, G. J., Chai, C. S., & Jiang, M. Y. C. (2022). Trends and exemplary practices of STEM teacher professional development programs in K-12 contexts: A systematic review of empirical studies. Computers & Education . https://doi.org/10.1016/j.compedu.2022.104577
Hwang, G. J., & Tsai, C. C. (2011). Research trends in mobile and ubiquitous learning: A review of publications in selected journals from 2001 to 2010. British Journal of Educational Technology, 42 (4), E65–E70.
Hwang, G. J., Xie, H., Wah, B. W., & Gašević, D. (2020). Vision, challenges, roles and research issues of artificial intelligence in education. Computers and Education: Artificial Intelligence, 1 , 100001. https://doi.org/10.1016/j.caeai.2020.100001
Hynes, M. M., Mathis, C., Purzer, S., Rynearson, A., & Siverling, E. (2017). Systematic review of research in P-12 engineering education from 2000–2015. International Journal of Engineering Education, 33 (1), 453–462.
Iio, T., Maeda, R., Ogawa, K., Yoshikawa, Y., Ishiguro, H., Suzuki, K., Aoki, T., Maesaki, M., & Hama, M. (2019). Improvement of Japanese adults’ English speaking skills via experiences speaking to a robot. Journal of Computer Assisted Learning, 35 (2), 228–245. https://doi.org/10.1111/jcal.12325
*Jaipal-Jamani, K., & Angeli, C. (2017). Effect of robotics on elementary preservice teachers’ self-efficacy, science learning, and computational thinking. Journal of Science Education and Technology, 26 (2), 175–192. https://doi.org/10.1007/s10956-016-9663-z
Johnson, B., & Christensen, L. (2000). Educational research: Quantitative and qualitative approaches . Allyn & Bacon.
Jou, M., Chuang, C. P., & Wu, Y. S. (2010). Creating interactive web-based environments to scaffold creative reasoning and meaningful learning: From physics to products. Turkish Online Journal of Educational Technology-TOJET, 9 (4), 49–57.
Jung, S., & Won, E. (2018). Systematic review of research trends in robotics education for young children. Sustainability, 10 (4), 905. https://doi.org/10.3390/su10040905
Kelley, T. R., & Knowles, J. G. (2016). A conceptual framework for integrated STEM education. International Journal of STEM Education, 3 , 11. https://doi.org/10.1186/s40594-016-0046-z
Kennedy, J., Baxter, P., & Belpaeme, T. (2015). Comparing robot embodiments in a guided discovery learning interaction with children. International Journal of Social Robotics, 7 (2), 293–308. https://doi.org/10.1007/s12369-014-0277-4
*Kim, C., Kim, D., Yuan, J., Hill, R. B., Doshi, P., & Thai, C. N. (2015). Robotics to promote elementary education pre-service teachers’ STEM engagement, learning, and teaching. Computers and Education., 91 , 14–31. https://doi.org/10.1016/j.compedu.2015.08.005
*Kim, C. M., Yuan, J., Vasconcelos, L., Shin, M., & Hill, R. B. (2018). Debugging during block-based programming. Instructional Science, 46 (5), 767–787. https://doi.org/10.1007/s11251-018-9453-5
*Konijn, E. A., & Hoorn, J. F. (2020). Robot tutor and pupils’ educational ability: Teaching the times tables. Computers and Education, 157 , 103970. https://doi.org/10.1016/j.compedu.2020.103970
Köse, H., Uluer, P., Akalın, N., Yorgancı, R., Özkul, A., & Ince, G. (2015). The effect of embodiment in sign language tutoring with assistive humanoid robots. International Journal of Social Robotics, 7 (4), 537–548. https://doi.org/10.1007/s12369-015-0311-1
Kucuk, S., Aydemir, M., Yildirim, G., Arpacik, O., & Goktas, Y. (2013). Educational technology research trends in Turkey from 1990 to 2011. Computers & Education, 68 , 42–50. https://doi.org/10.1016/j.compedu.2013.04.016
Lamptey, D. L., Cagliostro, E., Srikanthan, D., Hong, S., Dief, S., & Lindsay, S. (2021). Assessing the impact of an adapted robotics programme on interest in science, technology, engineering and mathematics (STEM) among children with disabilities. International Journal of Disability, Development and Education, 68 (1), 62–77. https://doi.org/10.1080/1034912X.2019.1650902
*Leonard, J., Buss, A., Gamboa, R., Mitchell, M., Fashola, O. S., Hubert, T., & Almughyirah, S. (2016). Using robotics and game design to enhance children’s self-efficacy, STEM attitudes, and computational thinking skills. Journal of Science Education and Technology, 25 (6), 860–876. https://doi.org/10.1007/s10956-016-9628-2
*Leonard, J., Mitchell, M., Barnes-Johnson, J., Unertl, A., Outka-Hill, J., Robinson, R., & Hester-Croff, C. (2018). Preparing teachers to engage rural students in computational thinking through robotics, game design, and culturally responsive teaching. Journal of Teacher Education, 69 (4), 386–407. https://doi.org/10.1177/0022487117732317
*Li, Y., Huang, Z., Jiang, M., & Chang, T. W. (2016). The effect on pupils’ science performance and problem-solving ability through Lego: An engineering design-based modeling approach. Educational Technology and Society, 19 (3), 143–156. https://doi.org/10.2307/jeductechsoci.19.3.14
Lin, H. C., & Hwang, G. J. (2019). Research trends of flipped classroom studies for medical courses: A review of journal publications from 2008 to 2017 based on the technology-enhanced learning model. Interactive Learning Environments, 27 (8), 1011–1027. https://doi.org/10.1080/10494820.2018.1467462
*Luo, W., Wei, H. R., Ritzhaupt, A. D., Huggins-Manley, A. C., & Gardner-McCune, C. (2019). Using the S-STEM survey to evaluate a middle school robotics learning environment: Validity evidence in a different context. Journal of Science Education and Technology, 28 (4), 429–443. https://doi.org/10.1007/s10956-019-09773-z
*Ma, H. L., Wang, X. H., Zhao, M., Wang, L., Wang, M. R., & Li, X. J. (2020). Impact of robotic instruction with a novel inquiry framework on primary schools students. International Journal of Engineering Education, 36 (5), 1472–1479.
Margot, K. C., & Kettler, T. (2019). Teachers’ perception of STEM integration and education: A systematic literature review. International Journal of STEM Education, 6 (1), 1–16. https://doi.org/10.1186/s40594-018-0151-2
Martín-Páez, T., Aguilera, D., Perales-Palacios, F. J., & Vílchez-González, J. M. (2019). What are we talking about when we talk about STEM education? A review of literature. Science Education, 103 (4), 799–822. https://doi.org/10.1002/sce.21522
*McDonald, S., & Howell, J. (2012). Watching, creating and achieving: Creative technologies as a conduit for learning in the early years. British Journal of Educational Technology, 43 (4), 641–651. https://doi.org/10.1111/j.1467-8535.2011.01231.x
*Meyers, K., Goodrich, V. E., Brockman, J. B., & Caponigro, J. (2012). I2D2: Imagination, innovation, discovery, and design. In 2012 ASEE annual conference & exposition (pp. 25–707). https://doi.org/10.18260/1-2--21464
Moher, D., Liberati, A., Tetzlaff, J., Altman, D. G., Prisma Group. (2009). Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. PLoS Medicine . https://doi.org/10.1371/journal.pmed.1000097
Moomaw, S. (2012). STEM Begins in the Early Years. School Science and Mathematics, 112 (2), 57–58. https://doi.org/10.1111/j.1949-8594.2011.00119.x
Nel, H., Ettershank, M., & Venter, J. (2017). AfrikaBot: Design of a robotics challenge to promote STEM in Africa. In M. Auer, D. Guralnick, & J. Uhomoibhi (Eds.), Interactive collaborative learning. ICL 2016. Advances in intelligent systems and computing. Springer. https://doi.org/10.1007/978-3-319-50340-0_44
*Newton, K. J., Leonard, J., Buss, A., Wright, C. G., & Barnes-Johnson, J. (2020). Informal STEM: Learning with robotics and game design in an urban context. Journal of Research on Technology in Education, 52 (2), 129–147. https://doi.org/10.1080/15391523.2020.1713263
Okita, S. Y. (2014). The relative merits of transparency: Investigating situations that support the use of robotics in developing student learning adaptability across virtual and physical computing platforms. British Journal of Educational Technology, 45 (5), 844–862. https://doi.org/10.1111/bjet.12101
Özdemir, D., & Karaman, S. (2017). Investigating interactions between students with mild mental retardation and humanoid robot in terms of feedback types. Education and Science, 42 (191), 109–138. https://doi.org/10.15390/EB.2017.6948
Özüorçun, N. Ç., & Bicen, H. (2017). Does the inclusion of robots affect engineering students’ achievement in computer programming courses? Eurasia Journal of Mathematics, Science and Technology Education, 13 (8), 4779–4787. https://doi.org/10.12973/eurasia.2017.00964a
*Pérez, S. E., & López, J. F. (2019). An ultra-low cost line follower robot as educational tool for teaching programming and circuit’s foundations. Computer Applications in Engineering Education, 27 (2), 288–302. https://doi.org/10.1002/cae.22074
*Phamduy, P., Leou, M., Milne, C., & Porfiri, M. (2017). An interactive robotic fish exhibit for designed settings in informal science learning. IEEE Transactions on Education, 60 (4), 273–280. https://doi.org/10.1109/TE.2017.2695173
*Ryan, M., Gale, J., & Usselman, M. (2017). Integrating engineering into core science instruction: Translating NGSS principles into practice through iterative curriculum design. International Journal of Engineering Education., 33 (1), 321–331.
*Sen, C., Ay, Z. S., & Kiray, S. A. (2021). Computational thinking skills of gifted and talented students in integrated STEM activities based on the engineering design process: The case of robotics and 3D robot modeling. Thinking Skills and Creativity, 42 , 100931. https://doi.org/10.1016/j.tsc.2021.100931
Spolaôr, N., & Benitti, F. B. V. (2017). Robotics applications grounded in learning theories on tertiary education: A systematic review. Computers & Education, 112 , 97–107. https://doi.org/10.1016/j.compedu.2017.05.001
*Stewart, W. H., Baek, Y., Kwid, G., & Taylor, K. (2021). Exploring factors that influence computational thinking skills in elementary students’ collaborative robotics. Journal of Educational Computing Research, 59 (6), 1208–1239. https://doi.org/10.1177/0735633121992479
*Sullivan, A., & Bers, M. U. (2016). Robotics in the early childhood classroom: Learning outcomes from an 8-week robotics curriculum in pre-kindergarten through second grade. International Journal of Technology and Design Education, 26 (1), 3–20. https://doi.org/10.1007/s10798-015-9304-5
*Sullivan, A., & Bers, M. U. (2019). Investigating the use of robotics to increase girls’ interest in engineering during early elementary school. International Journal of Technology and Design Education, 29 , 1033–1051. https://doi.org/10.1007/s10798-018-9483-y
*Taylor, M. S. (2018). Computer programming with pre-K through first-grade students with intellectual disabilities. Journal of Special Education, 52 (2), 78–88. https://doi.org/10.1177/0022466918761120
Taylor, R. P. (1980). Introduction. In R. P. Taylor (Ed.), The computer in school: Tutor, tool, tutee (pp. 1–10). Teachers College Press.
Tselegkaridis, S., & Sapounidis, T. (2021). Simulators in educational robotics: A review. Education Sciences, 11 (1), 11. https://doi.org/10.3390/educsci11010011
*Üçgül, M., & Altıok, S. (2022). You are an astroneer: The effects of robotics camps on secondary school students’ perceptions and attitudes towards STEM. International Journal of Technology and Design Education, 32 (3), 1679–1699. https://doi.org/10.1007/s10798-021-09673-7
*Ucgul, M., & Cagiltay, K. (2014). Design and development issues for educational robotics training camps. International Journal of Technology and Design Education, 24 (2), 203–222. https://doi.org/10.1007/s10798-013-9253-9
van den Berghe, R., Verhagen, J., Oudgenoeg-Paz, O., Van der Ven, S., & Leseman, P. (2019). Social robots for language learning: A review. Review of Educational Research, 89 (2), 259–295. https://doi.org/10.3102/0034654318821286
Zhang, Y., Luo, R., Zhu, Y., & Yin, Y. (2021). Educational robots improve K-12 students’ computational thinking and STEM attitudes: Systematic review. Journal of Educational Computing Research, 59 (7), 1450–1481. https://doi.org/10.1177/0735633121994070
Zhong, B., & Xia, L. (2020). A systematic review on exploring the potential of educational robotics in mathematics education. International Journal of Science and Mathematics Education, 18 (1), 79–101. https://doi.org/10.1007/s10763-018-09939-y
Download references
Acknowledgements
The authors would like to express their gratefulness to the three anonymous reviewers for providing their precious comments to refine this manuscript.
This study was supported by the Ministry of Science and Technology of Taiwan under contract numbers MOST-109-2511-H-011-002-MY3 and MOST-108-2511-H-011-005-MY3; National Science and Technology Council (TW) (NSTC 111-2410-H-031-092-MY2); Soochow University (TW) (111160605-0014). Any opinions, findings, conclusions, and/or recommendations expressed in this paper are those of the authors and do not necessarily reflect the views of Ministry of Science and Technology of Taiwan.
Author information
Authors and affiliations.
Graduate Institute of Digital Learning and Education, National Taiwan University of Science and Technology, 43, Sec. 4, Keelung Rd., Taipei, 106, Taiwan
Darmawansah Darmawansah, Gwo-Jen Hwang & Jia-Cing Liang
Department of English Language and Literature, Soochow University, Q114, No. 70, Linhsi Road, Shihlin District, Taipei, 111, Taiwan
Mei-Rong Alice Chen
Yuan Ze University, 135, Yuandong Road, Zhongli District, Taipei, Taiwan
Gwo-Jen Hwang
You can also search for this author in PubMed Google Scholar
Contributions
DD, MR and GJ conceptualized the study. MR wrote the outline and DD wrote draft. DD, MR and GJ contributed to the manuscript through critical reviews. DD, MR and GJH revised the manuscript. DD, MR and GJ finalized the manuscript. DD edited the manuscript. MR and GJ monitored the project and provided adequate supervision. DD, MR and JC contributed with data collection, coding, analyses and interpretation. All authors read and approved the final manuscript.
Corresponding author
Correspondence to Mei-Rong Alice Chen .
Ethics declarations
Competing interests.
The authors declare that they have no competing interests.
Additional information
Publisher's note.
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Additional file 1..
Coded papers.
Appendix 1. Summary of selected studies from the angle of research issue
# | Authors | Dimension | ||||
|---|---|---|---|---|---|---|
Location | Sample size | Duration of intervention | Research methods | Research foci | ||
1 | Convertini ( ) | Italy | 21–40 | ≤ 1 day | Experimental design | Problem solving, collaboration or teamwork, and communication |
2 | Lamptey et. al. ( ) | Canada | 41–60 | ≤ 8 weeks | Mixed method | Satisfaction or interest, and learning perceptions |
3 | Üçgül and Altıok ( ) | Turkey | 41–60 | ≤ 1 day | Questionnaire or survey | Attitude and motivation, learning perceptions |
4 | Sen et. al. ( ) | Turkey | 1–20 | ≤ 4 weeks | Experimental design | Problem solving, critical thinking, logical thinking, creativity, collaboration or teamwork, and communication |
5 | Stewart et. al. ( ) | USA | > 80 | ≤ 6 months | Mixed method | Higher order thinking skills, problem-solving, technology acceptance, attitude and motivation, and learning perceptions |
6 | Bernstein et. al. ( ) | USA | 1–20 | ≤ 1 day | Questionnaire or survey | Attitude and motivation, and learning perceptions |
7 | Chang and Chen ( ) | Taiwan | 41–60 | ≤ 8 weeks | Mixed method | Learning performance, problem-solving, satisfaction or interest, and operational skill |
8 | Chang and Chen ( ) | Taiwan | 41–60 | ≤ 8 weeks | Experimental design | Learning perceptions, and operational skill |
9 | Chapman et al. ( ) | USA | > 80 | ≤ 8 weeks | Mixed method | Learning performance, and learning perceptions |
10 | Chiang et. al. ( ) | China | 41–60 | ≤ 4 weeks | Questionnaire or survey | Creativity, and self-efficacy and confidence |
11 | Guven et. al. ( ) | Turkey | 1–20 | ≤ 6 months | Mixed method | Creativity, technology acceptance, attitude and motivation, self-efficacy or confidence, satisfaction or interest, and learning perception |
12 | Hennessy Elliott ( ) | USA | 1–20 | ≤ 12 months | Experimental design | Collaboration, communication, and preview situation |
13 | Konijn and Hoorn ( ) | Netherlands | 41–60 | ≤ 4 weeks | Experimental design | Learning performance, and learning behavior |
14 | Ma et. al. ( ) | China | 41–60 | ≤ 6 months | Mixed method | Learning performance, learning perceptions, and learning behavior |
15 | Newton et. al. ( ) | USA | > 80 | ≤ 6 months | Mixed method | Attitude and motivation, and self-efficacy and confidence |
16 | Luo et. al. ( ) | USA | 41–60 | ≤ 4 weeks | Questionnaire or survey | Technology acceptance, attitude and motivation, and self-efficacy |
17 | Pérez and López ( ) | Mexico | 21–40 | ≤ 6 months | System development | Operational skill |
18 | Sullivan and Bers ( ) | USA | > 80 | ≤ 8 weeks | Mixed method | Attitude and motivation, satisfaction or interest, and learning behavior |
19 | Barak and Assal ( ) | Israel | 21–40 | ≤ 6 months | Mixed method | Learning performance, technology acceptance, self-efficacy, and satisfaction or interest |
20 | Castro et. al. ( ) | Italy | > 80 | ≤ 8 weeks | Questionnaire or survey | Learning performance, and self-efficacy |
21 | Casey et. al. ( ) | USA | > 80 | ≤ 12 months | Questionnaire or survey | Learning satisfaction |
22 | Kim et. al. ( ) | USA | 1–20 | ≤ 4 weeks | Questionnaire or survey | Problem solving, and preview situation |
23 | Leonard et. al. ( ) | USA | 41–60 | ≤ 12 months | Questionnaire or survey | Learning performance, self-efficacy, and learning perceptions |
24 | Taylor ( ) | USA | 1–20 | ≤ 1 day | Experimental design | Learning performance, and preview situation |
25 | Gomoll et. al. ( ) | USA | 21–40 | ≤ 8 weeks | Experimental design | Problem solving, collaboration, communication |
26 | Jaipal-Jamani and Angeli ( ) | Canada | 21–40 | ≤ 4 weeks | Mixed method | Learning performance, self-efficacy, and satisfaction or interest |
27 | Phamduy et. al. ( ) | USA | > 80 | ≤ 4 weeks | Mixed method | Satisfaction or interest, and learning behavior |
28 | Ryan et. al. ( ) | USA | 1–20 | ≤ 12 months | Questionnaire or survey | Learning perceptions |
29 | Gomoll et. al. ( ) | USA | 21–40 | ≤ 6 months | Experimental design | Satisfaction or interest, and learning perceptions |
30 | Leonard et. al. ( ) | USA | 61–80 | ≤ 4 weeks | Mixed method | Attitude and motivation, and self-efficacy |
31 | Li et. al. ( ) | China | 21–40 | ≤ 8 weeks | Experimental design | Learning performance, and problem-solving, |
32 | Sullivan and Bers ( ) | USA | 41–60 | ≤ 8 weeks | Experimental design | Learning performance, and operational skill |
33 | Ayar ( ) | Turkey | > 80 | ≤ 4 weeks | Questionnaire or survey | Attitude and motivation, satisfaction or interest, and learning perceptions |
34 | Christensen et. al. ( ) | USA | > 80 | ≤ 6 months | Questionnaire or survey | Technology acceptance, satisfaction or interest, and learning perceptions |
35 | Kim et al. ( ) | USA | 1–20 | ≤ 4 weeks | Mixed method | Learning performance, satisfaction or interest, and learning perceptions |
36 | Barker et. al. ( ) | USA | 21–40 | ≤ 4 weeks | Questionnaire or survey | Technology acceptance, attitude and motivation, and learning perceptions |
37 | Ucgul and Cagiltay ( ) | Turkey | 41–60 | ≤ 4 weeks | Questionnaire or survey | Learning performance, satisfaction or interest, and learning perceptions |
38 | McDonald and Howell ( ) | Australia | 1–20 | ≤ 8 weeks | Mixed method | Learning performance, operational skills, and learning behavior |
39 | Meyers et. al. ( ) | USA | > 80 | ≤ 4 weeks | Questionnaire or survey | Learning perceptions |
Appendix 2. Summary of selected studies from the angles of interaction and application
# | Authors | Interaction | Application | ||||||
|---|---|---|---|---|---|---|---|---|---|
Participants | Role of robot | Types of robot | Dominant STEM discipline | Contribution to STEM | Integration of robot and STEM | Pedagogical intervention | Educational objectives | ||
1 | Convertini ( ) | Preschool or Kindergarten | Tutee | LEGO (Mindstorms) | Engineering | Structure and construction | Context integration | Active construction | Learning and transfer skills |
2 | Lamptey et. al. ( ) | Non-specified | Tool | LEGO (Mindstorms) | Technology | Programming | Supporting content integration | Problem-based learning | Learning and transfer skills |
3 | Üçgül and Altıok ( ) | Junior high school students | Tool | LEGO (Mindstorms) | Technology | Programming | Content integration | Project-based learning | Creativity and motivation |
4 | Sen et. al. ( ) | Others (gifted and talented students) | Tutee | LEGO (Mindstorms) | Technology | Programming, and Mathematical methods | Supporting content integration | Problem-based learning | Learning and transfer skills |
5 | Stewart et. al. ( ) | Elementary school students | Tool | Botball robot | Technology | Programming, and power and dynamical system | Content integration | Project-based learning | Learning and transfer skills |
6 | Bernstein et. al. ( ) | In-service teachers | Tool | Non-specified | Science | Biomechanics | Content integration | Project-based learning | Teachers’ professional development |
7 | Chang and Chen ( ) | High school students | Tool | Arduino | Interdisciplinary | Basic Physics, Programming, Component design, and mathematical methods | Content integration | Project-based learning | Learning transfer and skills |
8 | Chang and Chen ( ) | High school students | Tool | Arduino | Interdisciplinary | Basic Physics, Programming, Component design, and mathematical methods | Content integration | Project-based learning | Learning transfer and skills |
9 | Chapman et. al. ( ) | Elementary, middle, and high school students | Tool | LEGO (Mindstorms) and Maglev trains | Engineering | Engineering | Content integration | Engaged learning | Learning transfer and skills |
10 | Chiang et. al. ( ) | Non-specified | Tool | LEGO (Mindstorms) | Technology | Non-specified | Context integration | Edutainment | Creativity and motivation |
11 | Guven et. al. ( ) | Elementary school students | Tutee | Arduino | Technology | Programming | Content integration | Constructivism | Creativity and motivation |
12 | Hennessy Elliott ( ) | Students and teachers | Tool | Non-specified | Technology | Non-specified | Supporting content integration | Collaborative learning | General benefits of educational robotics |
13 | Konijn and Hoorn ( ) | Elementary school students | Tutor | Nao robot | Mathematics | Mathematical methods | Supporting content integration | Engaged learning | Learning and transfer skills |
14 | Ma et. al. ( ) | Elementary school students | Tool | Microduino and Makeblock | Engineering | Non-specified | Content integration | Experiential learning | Learning and transfer skills |
15 | Newton et. al. ( ) | Elementary school students | Tool | LEGO (Mindstorms) | Technology | Programming | Supporting content integration | Active construction | Learning and transfer skills |
16 | Luo et. al. ( ) | Junior high or middle school | Tool | Vex robots | Interdisciplinary | Programming, Engineering, and Mathematics | Content integration | Constructivism | General benefits of educational robots |
17 | Pérez and López ( ) | High school students | Tutee | Arduino | Engineering | Programming, and mechanics | Content integration | Project-based learning | Learning and transfer skills |
18 | Sullivan and Bers ( ) | Kindergarten and Elementary school students | Tool | KIBO robots | Technology | Programming | Context integration | Project-based learning | Learning and transfer skills |
19 | Barak and Assal ( ) | High school students | Tool | Non-specified | Technology | Programming, mathematical methods | Content integration | Problem-based learning | Learning and transfer skills |
20 | Castro et. al. ( ) | Lower secondary | Tool | Bee-bot | Technology | Programming | Content integration | Problem-based learning | Learning and transfer skills |
21 | Casey et. al. ( ) | Elementary school students | Tool | Roamers robot | Technology | Programming | Content integration | Metacognitive learning | Learning and transfer skills |
22 | Kim et. al. ( ) | Pre-service teachers | Tool | Non-specified | Technology | Programming | Supporting content integration | Problem-based learning | Learning and transfer skills |
23 | Leonard et. al. ( ) | In-service teachers | Tool | LEGO (Mindstorms) | Technology | Programming | Supporting content integration | Project-based learning | Teachers’ professional development |
24 | Taylor ( ) | Kindergarten and elementary school students | Tool | Dash robot | Technology | Programming, | Content integration | Problem-based learning | Learning and transfer skills |
25 | Gomoll et. al. ( ) | Middle school students | Tool | iRobot create | Technology | Programming, and structure and construction | Content integration | Problem-based learning | Learning and transfer skills |
26 | Jaipal-Jamani and Angeli ( ) | Pre-service teachers | Tool | LEGO WeDo | Technology | Programming | Supporting content integration | Project-based learning | Learning and transfer skills |
27 | Phamduy et. al. ( ) | Non-specified | Tutee | Arduino | Science | Biology | Context integration | Edutainment | Diversity and broadening participation |
28 | Ryan et. al. ( ) | In-service teachers | Tool | LEGO (Mindstorms) | Engineering | Engineering | Content integration | Constructivism | Teacher’s professional development |
29 | Gomoll et. al. ( ) | Non-specified | Tool | iRobot create | Technology | Programming | Content integration | Project-based learning | Learning and transfer skill |
30 | Leonard et. al. ( ) | Middle school students | Tool | LEGO (Mindstorms) | Technology | Programming | Content integration | Project-based learning | Learning and transfer skill |
31 | Li et. al. ( ) | Elementary school students | Tool | LEGO Bricks | Engineering | Structure and construction | Supporting content integration | Project-based learning | General benefits of educational robotics |
32 | Sullivan and Bers ( ) | Kindergarten and Elementary school students | Tool | Kiwi Kits | Engineering | Digital signal process | Content integration | Project-based learning | Learning and transfer skill |
33 | Ayar ( ) | High school students | Tool | Nao robot | Engineering | Component design | Content integration | Edutainment | Creativity and 34motivation |
34 | Christensen et. al. ( ) | Middle and high school students | Tutee | Non-specified | Engineering | Engineering | Context integration | Edutainment | Creativity and motivation |
35 | Kim et. al. ( ) | Pre-service teachers | Tool | RoboRobo | Technology | Programming | Supporting content integration | Engaged learning | Teachers’ professional development |
36 | Barker et. al. ( ) | In-service teachers | Tool | LEGO (Mindstorms) | Technology | Geography information system, and programming | Supporting content integration | Constructivism | Creativity and motivation |
37 | Ucgul and Cagiltay ( ) | Elementary and Middle school students | Tool | LEGO (Mindstorms) | Technology | Programming, mechanics, and mathematics | Content integration | Project-based learning | General benefits of educational robots |
38 | McDonald and Howell ( ) | Elementary school students | Tool | LEGO WeDo | Technology | Programming, and students and construction | Content integration | Project-based learning | Learning and transfer skills |
39 | Meyers et. al. ( ) | Elementary school students | Tool | LEGO (Mindstorms) | Engineering | Engineering | Supporting content integration | Edutainment | Creativity and motivation |
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/ .
Reprints and permissions
About this article
Cite this article.
Darmawansah, D., Hwang, GJ., Chen, MR.A. et al. Trends and research foci of robotics-based STEM education: a systematic review from diverse angles based on the technology-based learning model. IJ STEM Ed 10 , 12 (2023). https://doi.org/10.1186/s40594-023-00400-3
Download citation
Received : 11 May 2022
Accepted : 13 January 2023
Published : 10 February 2023
DOI : https://doi.org/10.1186/s40594-023-00400-3
Share this article
Anyone you share the following link with will be able to read this content:
Sorry, a shareable link is not currently available for this article.
Provided by the Springer Nature SharedIt content-sharing initiative
- STEM education
- Interdisciplinary projects
- Twenty-first century skills
IEEE Account
- Change Username/Password
- Update Address
Purchase Details
- Payment Options
- Order History
- View Purchased Documents
Profile Information
- Communications Preferences
- Profession and Education
- Technical Interests
- US & Canada: +1 800 678 4333
- Worldwide: +1 732 981 0060
- Contact & Support
- About IEEE Xplore
- Accessibility
- Terms of Use
- Nondiscrimination Policy
- Privacy & Opting Out of Cookies
A not-for-profit organization, IEEE is the world's largest technical professional organization dedicated to advancing technology for the benefit of humanity. © Copyright 2024 IEEE - All rights reserved. Use of this web site signifies your agreement to the terms and conditions.
Robotics and Intelligent Systems Certificate Program
Topics for research in robotics and intelligent systems.
General areas for study and research:
Chemical and Biological Engineering
- Control of chemical and biological dynamic processes
- Optimal design of systems for material processing
- Manipulation of matter at atomic and molecular scale
Civil and Environmental Engineering
- Structural health monitoring and adaptive structures
- Water resources
- Earthquake detection and protective design
- Remote sensing of natural resources
- Urban planning and engineering
Computer Science
- Theory and practice of computation for physical systems
- Game playing, photo identification, and semantic identification
- Real-time algorithms for measurement, prediction, and control
- Artificial intelligence and machine learning
- Databases, Internet security, and privacy
Electrical Engineering
- Information theory
- Electricity, microelectronics, and electromagnetism
- Digital circuits and computation
- Image processing, face, and character recognition
- Video analysis and manipulation
- Telecommunications networks
- Autonomous vehicles
Mechanical and Aerospace Engineering
- Robotic devices and systems
- Autonomous air, sea, undersea, and land vehicles
- Space exploration and development
- Intelligent control systems
- Biomimetic modeling, dynamics, and control
- Cooperating robots for manufacturing and assembly
- Cooperative control of natural and engineered groups
- Identification of dynamic system models
- Optimal state estimation and control
Operations Research and Financial Engineering
- Intelligent transportation systems
- Financial management and risk analysis
- Dynamic resource management
- Decision science
- Optimal design
- Knowledge, reasoning, and language
- Logic and metaphysics
- Politics and art of robotics and intelligent systems
- Inference, reasoning, problem solving
- Human factors and human-machine interaction
- Human motor control
- Modeling perception
- Neural network (connectionist) modeling of cognitive functions
- Reinforcement learning
- Study of brain function using functional magnetic response imaging, electrical, and optical methods
Research on the Effect of Human-Robot Collaboration on Team Performance in a Project Context
15 Pages Posted: 13 Aug 2024
Shiying Shi
Henan Polytechnic University
Fangfang Zhao
affiliation not provided to SSRN
Mingming Hu
University of Leiden
Kunming University of Science and Technology
The application of robots in people's work is becoming increasingly common, and the deep integration of robots with various industries has changed the traditional work scene and organizational model. Project applications Artificial Intelligence technology is driving organizational change and innovation while fueling productivity across industries, which could lead to real, sustainable growth; however, there are cognitive differences in the mechanisms by which human-robot collaboration works on employee and team creativity, and there are significant challenges to sustainable cooperation between humans and AI. Based on resource preservation theory, self-regulation theory, and role theory, a mediated model of being regulated is proposed to specifically examine the mechanism of action and its boundary conditions by which human-robot collaboration decision-making affects employee and team creativity. By empirically analyzing 579 research data from team members, the results show that: 1) there is a significant positive effect of human-robot collaboration on team creativity; 2) learning inertia plays a significant mediating role between human-robot collaboration and team creativity; and 3) trust plays a moderating role in this process mechanism. The findings expand on the impact of human-robot collaboration in engineering projects and integrating sustainability practices into project management teams, providing lessons for the transformation of innovative practices, shifts in organizational change, and project sustainability.
Keywords: engineering project, human-robot collaboration, human-robot trust, learning inertia, team creativity, Sustainability
Suggested Citation: Suggested Citation
Henan Polytechnic University ( email )
Han zhang (contact author), affiliation not provided to ssrn ( email ).
No Address Available
University of Leiden ( email )
Netherlands
Kunming University of Science and Technology ( email )
Kunming Yunnan China Kunming China
Do you have a job opening that you would like to promote on SSRN?
Paper statistics.

Carnegie Mellon Holds Groundbreaking for Robotics Innovation Center
Cutting-edge facility will expand research space, provide advanced capabilities.
- Share on Facebook (opens in new window)
- Share on X (opens in new window)
- Share on LinkedIn (opens in new window)
- Print this page
- Share by email
Carnegie Mellon University has broken ground on construction for its Robotics Innovation Center (RIC), a new, cutting-edge facility that will significantly expand the institution’s physical space for research, development and testing for robotics, including related fields such as artificial intelligence and automation.
Located just east of CMU’s existing facility within Mill 19 in the Hazelwood Green development in Pittsburgh, the RIC will add 150,000 square feet of research space for robots that will operate on land, in water, in the air and perhaps even beyond Earth. The various spaces for development and testing will include a 50,000-square-foot indoor robot test facility, an open-layout wet lab, reconfigurable high bays, and a 1.5-acre, large-footprint outdoor lab with a 6,000-square-foot drone cage. Construction is expected to be completed in 2025.
Members of the CMU community, civic and community leaders, and project partners gathered on Friday, Dec. 15, for the groundbreaking event, which was held within Mill 19’s high bay. In 2019, CMU’s Manufacturing Futures Institute (opens in new window) and Advanced Robotics for Manufacturing Institute (opens in new window) were among the inaugural tenants of the Regional Industrial Development Corporation’s Mill 19, the first major project at Hazelwood Green (opens in new window) . The 178-acre brownfield was once the site of the Jones & Laughlin Steel Company and has become a key example of Pittsburgh’s evolution in an innovation-driven economy. It is being redeveloped by the Almono Limited Partnership with an eye on the region’s future and a vision guided by principles of sustainability, equity and inclusive economic opportunity for the project’s neighbors.
Speaking at the event, CMU President Farnam Jahanian (opens in new window) said: “Over the past generation, Pittsburgh has been making a comeback. Today, we are here to celebrate and to continue to support our region’s ongoing renaissance.”
Reflecting on the site’s importance when Pittsburgh was the global leader in steel output and the need to completely transform it following the industry’s decline, he added, “Hazelwood Green has become a model site for community collaboration and the future of manufacturing … While the product created here may be different, the ingredients that make Pittsburgh great — innovation, community and partnership — are all still the same.”
Pictured above: Participants in the RIC groundbreaking included Matthew Johnson-Roberson, Director, CMU Robotics Institute; School of Computer Science Dean Martial Hebert; Chris DeCardy, President, The Heinz Endowments; Jen Giovannitti, President and Trustee, Claude Worthington Benedum Foundation; Sam Reiman, Director and Trustee, Richard King Mellon Foundation; CMU President Farnam Jahanian; Pittsburgh City Councilmember Barb Warwick; Patrick, the robot; Sonya Tilghman, Executive Director, Hazelwood Initiative; the Rev. Michael Murray, Chair, Greater Hazelwood Community Collaborative; College of Engineering Dean Bill Sanders; CMU Trustee Anne Molloy; Mechanical Engineering Department Head Jon Cagan.
Joining the human groundbreaking participants was Patrick (opens in new window) , a robot designed to explore terrain to find soils that might be contaminated.

In addition to the leading-edge research that will take place at the RIC, the building will facilitate CMU’s STEM education programs and initiatives to engage Pittsburgh-area residents, with a focus on its Greater Hazelwood neighbors. These include K-12 education programs such as Girls of Steel Robotics (opens in new window) , the Robotics Academy (opens in new window) and Engineering Ambassadors (opens in new window) . The RIC also will include spaces open to the community and public art displays.
Construction of the Robotics Innovation Center has been made possible by a $45 million lead grant from the Richard King Mellon Foundation (opens in new window) . The Foundation also has provided a $30 million grant to expand and endow the university’s Manufacturing Futures Institute, which develops and brings to market advanced and additive manufacturing technologies. The co-location at Hazelwood Green of the RIC, MFI, the Advanced Robotics for Manufacturing Institute, Catalyst Connection (opens in new window) and the University of Pittsburgh’s BioForge Manufacturing Center is expected to create synergies and accelerate the work of researchers from multiple fields, as well as workforce development and technology integration programs that will resonate across the Pittsburgh region.
“When combined with thoughtful programs and policies to support K-12 education and workforce training, and fueled by Pittsburgh’s spirit of resiliency and self-determination, the new Robotics Innovation Center will cement Pittsburgh’s national and even world leadership in robotics,” said Sam Reiman, director and trustee of the Richard King Mellon Foundation who also serves on CMU’s Board of Trustees. “And that, in turn, will have ripple effects for Hazelwood and our entire economy.”
The site’s owner, Almono LP, is composed of the Claude Worthington Benedum Foundation, Richard King Mellon Foundation, and The Heinz Endowments. Tishman Speyer, Hazelwood Green’s master developer, is also partnering with CMU on the development of the RIC. Perkins Eastman is the project’s principal architect, and the Gilbane Mosites Joint Venture is serving as construction manager.
Support from government officials and public-private partnerships have played key roles in the successful redevelopment at Hazelwood Green and Carnegie Mellon’s investment at the site. The Advanced Robotics for Manufacturing Institute was created in 2017 through CMU’s winning bid to launch a robotics-focused Manufacturing USA Institute, and elected officials including President Joe Biden and other global leaders have visited on multiple occasions.
“The Robotics Innovation Center is — at its core — a project driven by meaningful community collaboration and Carnegie Mellon University’s record of innovation excellence,” said Allegheny County Executive-elect Sara Innamorato. “I’m excited by the economic opportunities it’s poised to bring to residents and the region — and especially to the community of Greater Hazelwood.”
Pittsburgh Councilmember Barbara Warwick said, “I've been so impressed watching the team at CMU and Tishman Speyer ... as you have taken such great care and time over many, many meetings and events to engage with Greater Hazelwood, both around the project itself and also around the broader community needs and how CMU can help.”

CMU is a member of the Greater Hazelwood Community Collaborative, a group of organizations focused on enhancing the economic, social and physical outcomes for all Greater Hazelwood residents. The university has partnered with the local community development organization, the Hazelwood Initiative, to connect with nearby residents and organizations to share plans for the RIC, discuss opportunities for community engagement and solicit feedback.
“It’s easy to see the historical parallels to the growth of the steel industry where innovations made Pittsburgh one of the most important cities in the world,” said Sonya Tilghman, executive director of the Hazelwood Initiative. “… As we stand here celebrating the RIC and the technological advancements it will bring, we can see the Robotics Innovation Center represents another opportunity for Pittsburgh and Hazelwood, in particular, to be recognized again for the amazing and critical work that happens here.”
Over the past 10 years, robotics research expenditures at CMU have nearly doubled, and are expected to double again over the next decade. Complementing the work of the university’s National Robotics Engineering Center (opens in new window) (NREC), the new facility will provide CMU robotics researchers with enhanced capacity and capabilities for foundational research, integration, iteration and commercialization that will allow discoveries to be translated into real-world technologies in fields such as health care, transportation, national security, education, agriculture and retail. It also is planned to include pre-incubator space for the next generation of CMU-affiliated robotics companies.
“CMU’s new Robotics Innovation Center will be truly transformative,” said Bill Sanders, the Dr. William D. and Nancy W. Strecker Dean of the CMU College of Engineering. “It will bring together fundamental and applied robotics and softbotics research in a dynamic and adaptive environment, working across traditional disciplinary boundaries to tackle future challenges.”
Carnegie Mellon has been the global pioneer in robotics research and education, founding the first U.S. university department devoted to the field in 1979. Last year, the university launched the first undergraduate robotics degree offered by a leading computer science program. Its Iris lunar rover, built by students, is scheduled to launch to the moon in early 2024.
“Robotics is a transformative set of technologies because it inspires people to think about how they can affect things outside themselves out there in the real world,” said Matthew Johnson-Roberson, director of CMU’s Robotics Institute. “… What I think we can do here is educate the next generation of roboticists to help us solve the world’s most challenging problems right here in Hazelwood.”
— Related Content —

Carnegie Mellon Unveils Design for New Richard King Mellon Hall of Sciences

FLOTUS Touts Pittsburgh as Workforce Hub at CMU’s Mill 19

CMU Celebrates Alan Magee Scaife Hall Grand Opening
- The Piper: Campus & Community News (opens in new window)
- Official Events Calendar (opens in new window)
How to Write a Research Proposal: (with Examples & Templates)

Table of Contents
Before conducting a study, a research proposal should be created that outlines researchers’ plans and methodology and is submitted to the concerned evaluating organization or person. Creating a research proposal is an important step to ensure that researchers are on track and are moving forward as intended. A research proposal can be defined as a detailed plan or blueprint for the proposed research that you intend to undertake. It provides readers with a snapshot of your project by describing what you will investigate, why it is needed, and how you will conduct the research.
Your research proposal should aim to explain to the readers why your research is relevant and original, that you understand the context and current scenario in the field, have the appropriate resources to conduct the research, and that the research is feasible given the usual constraints.
This article will describe in detail the purpose and typical structure of a research proposal , along with examples and templates to help you ace this step in your research journey.
What is a Research Proposal ?
A research proposal¹ ,² can be defined as a formal report that describes your proposed research, its objectives, methodology, implications, and other important details. Research proposals are the framework of your research and are used to obtain approvals or grants to conduct the study from various committees or organizations. Consequently, research proposals should convince readers of your study’s credibility, accuracy, achievability, practicality, and reproducibility.
With research proposals , researchers usually aim to persuade the readers, funding agencies, educational institutions, and supervisors to approve the proposal. To achieve this, the report should be well structured with the objectives written in clear, understandable language devoid of jargon. A well-organized research proposal conveys to the readers or evaluators that the writer has thought out the research plan meticulously and has the resources to ensure timely completion.
Purpose of Research Proposals
A research proposal is a sales pitch and therefore should be detailed enough to convince your readers, who could be supervisors, ethics committees, universities, etc., that what you’re proposing has merit and is feasible . Research proposals can help students discuss their dissertation with their faculty or fulfill course requirements and also help researchers obtain funding. A well-structured proposal instills confidence among readers about your ability to conduct and complete the study as proposed.
Research proposals can be written for several reasons:³
- To describe the importance of research in the specific topic
- Address any potential challenges you may encounter
- Showcase knowledge in the field and your ability to conduct a study
- Apply for a role at a research institute
- Convince a research supervisor or university that your research can satisfy the requirements of a degree program
- Highlight the importance of your research to organizations that may sponsor your project
- Identify implications of your project and how it can benefit the audience
What Goes in a Research Proposal?
Research proposals should aim to answer the three basic questions—what, why, and how.
The What question should be answered by describing the specific subject being researched. It should typically include the objectives, the cohort details, and the location or setting.
The Why question should be answered by describing the existing scenario of the subject, listing unanswered questions, identifying gaps in the existing research, and describing how your study can address these gaps, along with the implications and significance.
The How question should be answered by describing the proposed research methodology, data analysis tools expected to be used, and other details to describe your proposed methodology.
Research Proposal Example
Here is a research proposal sample template (with examples) from the University of Rochester Medical Center. 4 The sections in all research proposals are essentially the same although different terminology and other specific sections may be used depending on the subject.

Structure of a Research Proposal
If you want to know how to make a research proposal impactful, include the following components:¹
1. Introduction
This section provides a background of the study, including the research topic, what is already known about it and the gaps, and the significance of the proposed research.
2. Literature review
This section contains descriptions of all the previous relevant studies pertaining to the research topic. Every study cited should be described in a few sentences, starting with the general studies to the more specific ones. This section builds on the understanding gained by readers in the Introduction section and supports it by citing relevant prior literature, indicating to readers that you have thoroughly researched your subject.
3. Objectives
Once the background and gaps in the research topic have been established, authors must now state the aims of the research clearly. Hypotheses should be mentioned here. This section further helps readers understand what your study’s specific goals are.
4. Research design and methodology
Here, authors should clearly describe the methods they intend to use to achieve their proposed objectives. Important components of this section include the population and sample size, data collection and analysis methods and duration, statistical analysis software, measures to avoid bias (randomization, blinding), etc.
5. Ethical considerations
This refers to the protection of participants’ rights, such as the right to privacy, right to confidentiality, etc. Researchers need to obtain informed consent and institutional review approval by the required authorities and mention this clearly for transparency.
6. Budget/funding
Researchers should prepare their budget and include all expected expenditures. An additional allowance for contingencies such as delays should also be factored in.
7. Appendices
This section typically includes information that supports the research proposal and may include informed consent forms, questionnaires, participant information, measurement tools, etc.
8. Citations

Important Tips for Writing a Research Proposal
Writing a research proposal begins much before the actual task of writing. Planning the research proposal structure and content is an important stage, which if done efficiently, can help you seamlessly transition into the writing stage. 3,5
The Planning Stage
- Manage your time efficiently. Plan to have the draft version ready at least two weeks before your deadline and the final version at least two to three days before the deadline.
- What is the primary objective of your research?
- Will your research address any existing gap?
- What is the impact of your proposed research?
- Do people outside your field find your research applicable in other areas?
- If your research is unsuccessful, would there still be other useful research outcomes?
The Writing Stage
- Create an outline with main section headings that are typically used.
- Focus only on writing and getting your points across without worrying about the format of the research proposal , grammar, punctuation, etc. These can be fixed during the subsequent passes. Add details to each section heading you created in the beginning.
- Ensure your sentences are concise and use plain language. A research proposal usually contains about 2,000 to 4,000 words or four to seven pages.
- Don’t use too many technical terms and abbreviations assuming that the readers would know them. Define the abbreviations and technical terms.
- Ensure that the entire content is readable. Avoid using long paragraphs because they affect the continuity in reading. Break them into shorter paragraphs and introduce some white space for readability.
- Focus on only the major research issues and cite sources accordingly. Don’t include generic information or their sources in the literature review.
- Proofread your final document to ensure there are no grammatical errors so readers can enjoy a seamless, uninterrupted read.
- Use academic, scholarly language because it brings formality into a document.
- Ensure that your title is created using the keywords in the document and is neither too long and specific nor too short and general.
- Cite all sources appropriately to avoid plagiarism.
- Make sure that you follow guidelines, if provided. This includes rules as simple as using a specific font or a hyphen or en dash between numerical ranges.
- Ensure that you’ve answered all questions requested by the evaluating authority.
Key Takeaways
Here’s a summary of the main points about research proposals discussed in the previous sections:
- A research proposal is a document that outlines the details of a proposed study and is created by researchers to submit to evaluators who could be research institutions, universities, faculty, etc.
- Research proposals are usually about 2,000-4,000 words long, but this depends on the evaluating authority’s guidelines.
- A good research proposal ensures that you’ve done your background research and assessed the feasibility of the research.
- Research proposals have the following main sections—introduction, literature review, objectives, methodology, ethical considerations, and budget.
Frequently Asked Questions
Q1. How is a research proposal evaluated?
A1. In general, most evaluators, including universities, broadly use the following criteria to evaluate research proposals . 6
- Significance —Does the research address any important subject or issue, which may or may not be specific to the evaluator or university?
- Content and design —Is the proposed methodology appropriate to answer the research question? Are the objectives clear and well aligned with the proposed methodology?
- Sample size and selection —Is the target population or cohort size clearly mentioned? Is the sampling process used to select participants randomized, appropriate, and free of bias?
- Timing —Are the proposed data collection dates mentioned clearly? Is the project feasible given the specified resources and timeline?
- Data management and dissemination —Who will have access to the data? What is the plan for data analysis?
Q2. What is the difference between the Introduction and Literature Review sections in a research proposal ?
A2. The Introduction or Background section in a research proposal sets the context of the study by describing the current scenario of the subject and identifying the gaps and need for the research. A Literature Review, on the other hand, provides references to all prior relevant literature to help corroborate the gaps identified and the research need.
Q3. How long should a research proposal be?
A3. Research proposal lengths vary with the evaluating authority like universities or committees and also the subject. Here’s a table that lists the typical research proposal lengths for a few universities.
| Arts programs | 1,000-1,500 | |
| University of Birmingham | Law School programs | 2,500 |
| PhD | 2,500 | |
| 2,000 | ||
| Research degrees | 2,000-3,500 |
Q4. What are the common mistakes to avoid in a research proposal ?
A4. Here are a few common mistakes that you must avoid while writing a research proposal . 7
- No clear objectives: Objectives should be clear, specific, and measurable for the easy understanding among readers.
- Incomplete or unconvincing background research: Background research usually includes a review of the current scenario of the particular industry and also a review of the previous literature on the subject. This helps readers understand your reasons for undertaking this research because you identified gaps in the existing research.
- Overlooking project feasibility: The project scope and estimates should be realistic considering the resources and time available.
- Neglecting the impact and significance of the study: In a research proposal , readers and evaluators look for the implications or significance of your research and how it contributes to the existing research. This information should always be included.
- Unstructured format of a research proposal : A well-structured document gives confidence to evaluators that you have read the guidelines carefully and are well organized in your approach, consequently affirming that you will be able to undertake the research as mentioned in your proposal.
- Ineffective writing style: The language used should be formal and grammatically correct. If required, editors could be consulted, including AI-based tools such as Paperpal , to refine the research proposal structure and language.
Thus, a research proposal is an essential document that can help you promote your research and secure funds and grants for conducting your research. Consequently, it should be well written in clear language and include all essential details to convince the evaluators of your ability to conduct the research as proposed.
This article has described all the important components of a research proposal and has also provided tips to improve your writing style. We hope all these tips will help you write a well-structured research proposal to ensure receipt of grants or any other purpose.
References
- Sudheesh K, Duggappa DR, Nethra SS. How to write a research proposal? Indian J Anaesth. 2016;60(9):631-634. Accessed July 15, 2024. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5037942/
- Writing research proposals. Harvard College Office of Undergraduate Research and Fellowships. Harvard University. Accessed July 14, 2024. https://uraf.harvard.edu/apply-opportunities/app-components/essays/research-proposals
- What is a research proposal? Plus how to write one. Indeed website. Accessed July 17, 2024. https://www.indeed.com/career-advice/career-development/research-proposal
- Research proposal template. University of Rochester Medical Center. Accessed July 16, 2024. https://www.urmc.rochester.edu/MediaLibraries/URMCMedia/pediatrics/research/documents/Research-proposal-Template.pdf
- Tips for successful proposal writing. Johns Hopkins University. Accessed July 17, 2024. https://research.jhu.edu/wp-content/uploads/2018/09/Tips-for-Successful-Proposal-Writing.pdf
- Formal review of research proposals. Cornell University. Accessed July 18, 2024. https://irp.dpb.cornell.edu/surveys/survey-assessment-review-group/research-proposals
- 7 Mistakes you must avoid in your research proposal. Aveksana (via LinkedIn). Accessed July 17, 2024. https://www.linkedin.com/pulse/7-mistakes-you-must-avoid-your-research-proposal-aveksana-cmtwf/
Paperpal is a comprehensive AI writing toolkit that helps students and researchers achieve 2x the writing in half the time. It leverages 21+ years of STM experience and insights from millions of research articles to provide in-depth academic writing, language editing, and submission readiness support to help you write better, faster.
Get accurate academic translations, rewriting support, grammar checks, vocabulary suggestions, and generative AI assistance that delivers human precision at machine speed. Try for free or upgrade to Paperpal Prime starting at US$19 a month to access premium features, including consistency, plagiarism, and 30+ submission readiness checks to help you succeed.
Experience the future of academic writing – Sign up to Paperpal and start writing for free!
Related Reads:
How to write a phd research proposal.
- What are the Benefits of Generative AI for Academic Writing?
- How to Avoid Plagiarism When Using Generative AI Tools
- What is Hedging in Academic Writing?
How to Write Your Research Paper in APA Format
The future of academia: how ai tools are changing the way we do research, you may also like, dissertation printing and binding | types & comparison , what is a dissertation preface definition and examples , how to write your research paper in apa..., how to choose a dissertation topic, how to write an academic paragraph (step-by-step guide), maintaining academic integrity with paperpal’s generative ai writing..., research funding basics: what should a grant proposal..., how to write an abstract in research papers..., how to write dissertation acknowledgements.
Pension Reforms and Inequality in Germany: Micro-Modelling
Germany, like many other countries, has undergone a series of pension reforms since the 1980s which generally decreased benefit generosity and increased the retirement age due to demographic pressures. This paper investigates whether these reforms have increased income and wealth inequality among retirees. In order to answer this question, we employed counterfactual simulations in which we predict how the income and social security wealth distributions would have developed if these reforms had not taken place, compared to the actual development of the income and social security wealth distributions. Our analysis reveals that the pension reforms has led to an increase in inequality in terms of social security wealth between the 1990s and 2000s and decreased inequality thereafter. The decrease in inequality is mainly driven by social assistance as it represents a lower bound for benefit size and thus mitigates the effect of benefit-reducing reforms for lower income groups. We further divided the total effect of the pension reforms into two components. The first component is the mechanical effect, which keeps retirement probabilities constant and only considers changes in benefit calculation. The second component is the behavioral effect, which describes how SSW differs because of altered retirement probabilities. Our findings indicate that in the German context the behavioral effect is statistically significant but economically small.
This paper uses data from the Socio-Economic Panel (SOEP), data for years 1984-2020, SOEP-Core v37, EU Edition, 2022, doi:10.5684/soep.core.v37eu. This paper is part of the National Bureau of Economic Research’s International Social Security (ISS) project. This phase of the ISS Project is supported by the Sloan Foundation (G-2019-12578), the National Institute on Aging (grants P01 AG012810 and P30-AG012810) and by the U.S. Social Security Administration through grant #5-RRC08098400-10 to the National Bureau of Economic Research as part of the SSA Retirement Research Consortium. The findings and conclusions expressed are solely those of the authors and do not represent the views of the Sloan Foundation, SSA, any agency of the Federal Government, or NBER. The authors thank the other members of the ISS Project for important methodological contributions, as well as Nicola Simonetti and Frederik Fetzer for their excellent research assistance. The views expressed herein are those of the authors and do not necessarily reflect the views of the National Bureau of Economic Research.
MARC RIS BibTeΧ
Download Citation Data
More from NBER
In addition to working papers , the NBER disseminates affiliates’ latest findings through a range of free periodicals — the NBER Reporter , the NBER Digest , the Bulletin on Retirement and Disability , the Bulletin on Health , and the Bulletin on Entrepreneurship — as well as online conference reports , video lectures , and interviews .

IMAGES
COMMENTS
In this post, we have listed 500+ recent research papers and projects for those who are interested in robotics. These free, downloadable research papers can shed lights into the some of the complex areas in robotics such as navigation, motion planning, robotic interactions, obstacle avoidance, actuators, machine learning, computer vision ...
This research paper explores the integration of artificial intelligence (AI) in robotics, specifically focusing on the transition from automation to autonomous systems. The paper provides an ...
Swarm robotics deals with the design, construction, and deployment of large groups of robots that coordinate and cooperatively solve a problem or perform a task. It takes inspiration from natural self-organizing systems, such as social insects, fish schools, or bird flocks, characterized by emergent collective behavior based on simple local interaction rules [1], [2]. Typically, swarm robotics ...
Abstract: Robots are automatic equipment integrating advanced technologies in multiple disciplines such as mechanics, electronics, control, sensors, and artificial intelligence. Based on a brief introduction of the development history of robotics, this paper reviews the classification of the type of robots, the key technologies involved, and the applications in various fields, analyze the ...
International Journal of Robotics Research (IJRR) was the first scholarly publication on robotics research; it continues to supply scientists and students in robotics and related fields - artificial intelligence, applied mathematics, computer science, electrical and mechanical engineering - with timely, multidisciplinary material... This journal is peer-reviewed and is a member of the ...
This paper provides a comprehensive review of the current status, advancements, and future prospects of humanoid robots, highlighting their significance in driving the evolution of next-generation industries. By analyzing various research endeavors and key technologies, encompassing ontology structure, control and decision-making, and perception and interaction, a holistic overview of the ...
This Special Issue of Applied Sciences, entitled "Recent Advances in Robotics and Intelligent Robots Applications", has 14 research papers, covering topics from bionics (contribution 1) and soft-material robot designs (contribution 14), infrared image algorithms (contribution 2), target tracking algorithms (contribution 3 and 7 ...
This literature review presents a comprehensive analysis of the use and potential application scenarios of collaborative robots in the industrial working world, focusing on their impact on human work, safety, and health in the context of Industry 4.0. The aim is to provide a holistic evaluation of the employment of collaborative robots in the current and future working world, which is being ...
Learning from Demonstrations, the field that proposes to learn robot behavior models from data, is gaining popularity with the emergence of deep generative models. Although the problem has been studied for years under names such as Imitation Learning, Behavioral Cloning, or Inverse Reinforcement Learning, classical methods have relied on models that don't capture complex data distributions ...
Robotics. Having a machine learning agent interact with its environment requires true unsupervised learning, skill acquisition, active learning, exploration and reinforcement, all ingredients of human learning that are still not well understood or exploited through the supervised approaches that dominate deep learning today.
View a PDF of the paper titled Foundation Models in Robotics: Applications, Challenges, and the Future, by Roya Firoozi and 14 other authors. We survey applications of pretrained foundation models in robotics. Traditional deep learning models in robotics are trained on small datasets tailored for specific tasks, which limits their adaptability ...
Robotic process automation is a disruptive technology to automate already digital yet manual tasks and subprocesses as well as whole business processes rapidly. In contrast to other process automation technologies, robotic process automation is lightweight and only accesses the presentation layer of IT systems to mimic human behavior. Due to the novelty of robotic process automation and the ...
A 'robot' is a system that can operate in a way similar to human actions, i.e., a system that takes decisions and accomplishes tasks assigned to it without external intervention. The development of the idea of robots led to the birth of the field of robotics, and robotics, in turn, led to the emergence of fields like automation.
The main objective of this paper is to motivate future research and engineering activities by providing a comprehensive list of existing platforms, projects and products as a starting point for applied research in swarm robotics. This paper classifies basic swarm behaviors and presents a comprehensive overview of current research platforms and ...
Robotics is an international, peer-reviewed, open access journal on robotics published monthly online by MDPI.The IFToMM is affiliated with Robotics and its members receive a discount on the article processing charges.. Open Access — free for readers, with article processing charges (APC) paid by authors or their institutions.; High Visibility: indexed within Scopus, ESCI (Web of Science ...
Reinforcement learning (RL), 1 one of the most popular research fields in the context of machine learning, effectively addresses various problems and challenges of artificial intelligence. It has led to a wide range of impressive progress in various domains, such as industrial manufacturing, 2 board games, 3 robot control, 4 and autonomous driving. 5 Robot has become one of the research hot ...
This review paper provides a literature survey of collaborative robots, or cobots, and their use in various industries. Cobots have gained popularity due to their ability to work with humans in a safe manner. The paper covers different aspects of cobots, including their design, control strategies, safety features, and human-robot interaction. The paper starts with a brief history and ...
The purpose of this study was to fill a gap in the current review of research on Robotics-based STEM (R-STEM) education by systematically reviewing existing research in this area. This systematic review examined the role of robotics and research trends in STEM education. A total of 39 articles published between 2012 and 2021 were analyzed.
robotics research will be useful in a wide variety of situations as robotic systems grow ever more complex. In this paper, we discuss the design goals of ROS, how our implementation works towards them, and demonstrate how ROS handles several common use cases of robotics software development. II. DESIGN GOALS
The combination of robotics and AI is transforming the discipline, leading to extraordinary advances and far-reaching repercussions. This abstract discusses the future of robotics in light of fast AI research, stressing its significant influence on numerous sectors and possible obstacles. AI-powered robots are learning and adapting. Advanced machine learning techniques allow robots to ...
Intelligent Human-Robot Integration: Shaping the Future of Robot-Assisted Flexible Manufacturing. Chenguang Yang. Ziwei Wang. Sheng Lin. 297 views. A multidisciplinary journal focusing on the theory of robotics, technology, and artificial intelligence, and their applications - from biomedical to space robotics.
Student. , M.Sc. I.T., I.C.S. College, Khed, Ratnagri. Abstract: This paper contains of detailed statistics about the robot's method and system. As one and all knows, how artificial. intelligence ...
This paper analyses the state‐of‐the‐art reviews in the development of autonomous pesticide spraying robots that are divided into four main categories; platform mobility and steering ...
This paper focuses on a metamorphic palletizing robot, elaborating on its working principles and analyzing its working trajectory. The primary aim is to address the complex challenge of multi-objective trajectory planning during the robot's motion, with a focus on minimizing time, energy consumption, and jerk.
Robotic devices and systems. Autonomous air, sea, undersea, and land vehicles. Space exploration and development. Intelligent control systems. Biomimetic modeling, dynamics, and control. Cooperating robots for manufacturing and assembly. Cooperative control of natural and engineered groups. Identification of dynamic system models.
By empirically analyzing 579 research data from team members, the results show that: 1) there is a significant positive effect of human-robot collaboration on team creativity; 2) learning inertia plays a significant mediating role between human-robot collaboration and team creativity; and 3) trust plays a moderating role in this process mechanism.
Perkins Eastman is the project's principal architect, and the Gilbane Mosites Joint Venture is serving as construction manager. ... Carnegie Mellon has been the global pioneer in robotics research and education, founding the first U.S. university department devoted to the field in 1979. Last year, the university launched the first ...
Before conducting a study, a research proposal should be created that outlines researchers' plans and methodology and is submitted to the concerned evaluating organization or person. Creating a research proposal is an important step to ensure that researchers are on track and are moving forward as intended. A research proposal can be defined as a detailed plan or blueprint for the proposed ...
This paper investigates whether these reforms have increased income and wealth inequality among retirees. In order to answer this question, we employed counterfactual simulations in which we predict how the income and social security wealth distributions would have developed if these reforms had not taken place, compared to the actual ...
This research, and any access to it, is intended only for "wholesale clients" within the meaning of the Australian Corporations Act, unless otherwise agreed by Goldman Sachs. In producing research reports, members of Global Investment Research of Goldman Sachs Australia may attend site visits and other meetings hosted by the companies and other